|
|
| ・Mindstorms NXT挑戦1(2022.6.10) |
 Lego Mindstormsをご存じでしょうか。レゴブロックから派生した プログラミング可能な一連の学習支援教材です。機構部品や能動 部品、プロセッサに接続できるセンサーなどを含みます。ホビーセット、 エキスパートビルダーセット、テクニックなどのシリーズを経て1998年に RCX、2006年にNXT、2013年に現行のEV3へと発展しています。 RCX~EV3とは、ブロック体の中にプロセッサが組み込まれた機構 制御の中心モジュールで、EV3にはメモリ64MBが実装された ARM9が搭載されています。写真は工房保有のブロック体(NXT インテリジェントブロック)で、販売・サポートとも既に終了しています。 |
|
 NXTのプロセッサはARM7、256KBのフラッシュメモリと 64KBのRAM、さらにコプロセッサAtmel AVRを内蔵します。 |
 テクニックのシリーズで、大きなIFボックスを介して LOGO言語で制御していた頃と隔世の感があります。 |
 RCXに付属するプログラミングアプリROBOLAB です。初期のNXTにも同梱されていたものです。 |
 Mindstormsに付属するアクチュエータやセンサーを 制御し、GUI操作で簡単にプログラムを作成できます。 |
 その後、NXT用に開発されたプログラミングアプリです。 現在もLEGO Educationからダウンロード可能です。 |
 各種ユーザーマニュアルもこちらや こちらからダウンロード可能です。 |
 詳細は分かりませんが、NXT関連製品の中に、C言語、C#、 Java、mrubyによるプログラミングを可能にするガイドブックが 存在します。汎用言語を導入することにより、GUIベースアプリ では到底不可能な、複雑な制御を記述することができるでしょう。 そして、NXTには写真のような各種のセンサーが付属します。 タッチ、サウンド、光、超音波に加え、オプションでカラー、温度、 距離、IRシーク、コンパス、あげく加速度、ジャイロまで揃って います。汎用言語と豊富なセンサーを組み合わせることで、 教育用にとどまらず研究・開発目的にも応用できるでしょう。 |
|
 実際ネット上を検索してみると、多くの大学、工学部で 制御の実験・実習に利用されていることが分かります。 |
 京都大学工学部電気電子工学科のサマーキャンプ、 立命館大学理工学部の電子情報工学演習など。 |
 城西国際大学メディア学部では、Microsoft Robotics Developer Studioによる制御が検討されています。 |
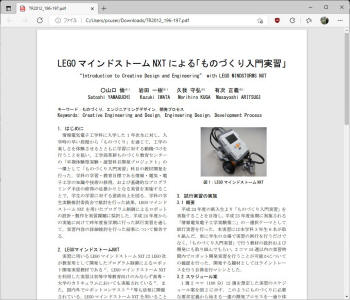 九州工業大学システム創成情報工学科では、 NXTによるものづくり入門実習が試行されています。 |
 こちらは沼津工業高等専門学校電子制御工学科のWEBページです。 同校牛丸先生(教授)の研究室では、制御工学の実験・実習にNXTを 活用されています。制御プログラムの開発環境としてbrickOS、NQC、 RobotC、そしてnxtOSEKを導入・整備され、学生向けにWEB版の 優れたチュートリアルを提供されています。牛丸先生の教材に倣い、 制御工学を取り入れたNXTの本格的な制御に挑戦したいと思います。 |
|
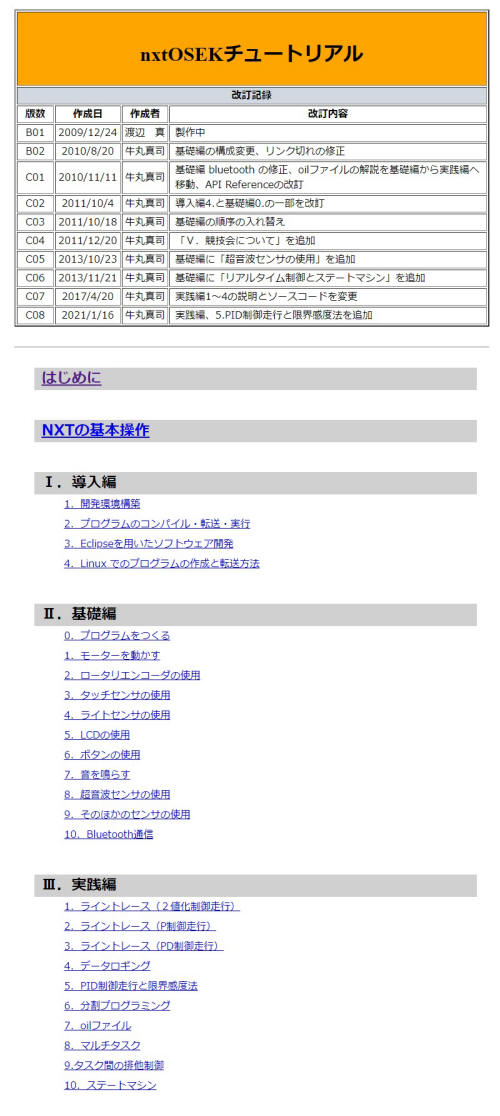 NXTの制御内容を汎用言語を用いて記述する環境は、沼津工専で 紹介されているだけでもいくつかの選択肢があります。これらの中から nxtOSEKを組み込んだ環境を取り上げることにします。OSEKとは、 ドイツ自動車産業が規定した自動車電子制御(ECU)用OSの業界 標準仕様で、このOSEKに準拠したNXT用OSがnxtOSEK(だそう) です。C/C++言語による開発環境を提供し、NXTのアクチュエータ、 各センサーを制御するAPIが含まれています。チュートリアルの項目を 眺めると、「Ⅲ.実践編」にライントレースの事例があり、2値制御から P制御、PD制御、さらにPID制御と発展していきます。何と制御工学の 威力を、NXTで試してみることができるわけです、チャレンジしましょう。 |
|
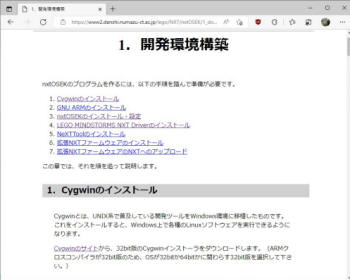 チュートリアルの最初は、nxtOSEKを 動作させる環境を構築する作業です。 |
 Windows上に疑似UNIX環境を構築 する方法として、Cygwinを導入します。 |
 CygwinのWEBサイトからインストーラをダウンロード します。setup-X86 64.exeが推奨されていますが、 |
 ARM用コンパイラが32ビットのため setup-X86.exeを使用します。 |
 インストーラを起動します。ほとんど 「次へ」を押していくだけです。 |
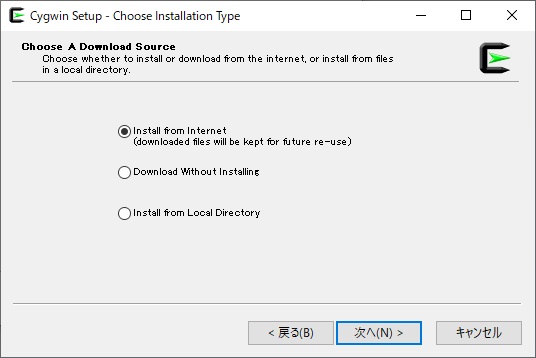 必要なモジュールを、インターネットから その都度ダウンロードするよう指定します。 |
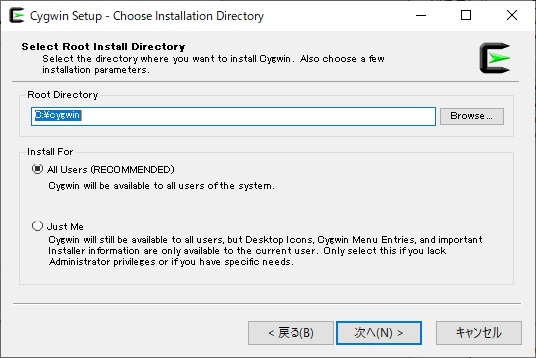 インストールフォルダを指定します。 「C:¥cygwin」のままなので「次へ」。 |
 ダウンロードファイルの保存先を指定します。デフォルトの ユーザフォルダのままでは使いにくいので変更します。 |
 インターネット接続に使用するプロキシの選択 ですが、システムの設定にお任せで「次へ」。 |
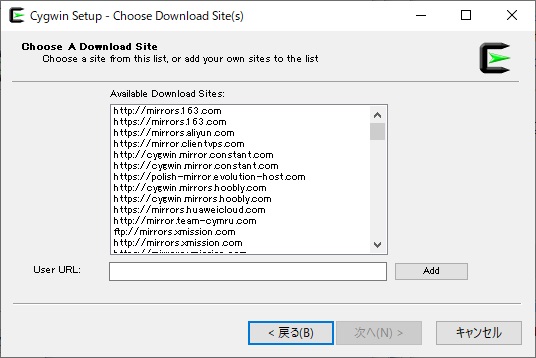 モジュールのダウンロードサイトを選びます。いくつか 試してみましたが多少スピードが異なる程度です。 |
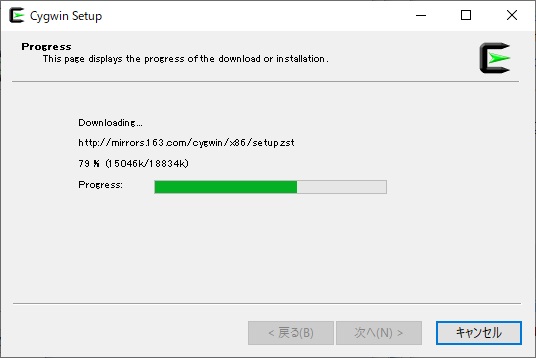 各FTPサイトのディレクトリから必要 ファイルのダウンロードが開始されます。 |
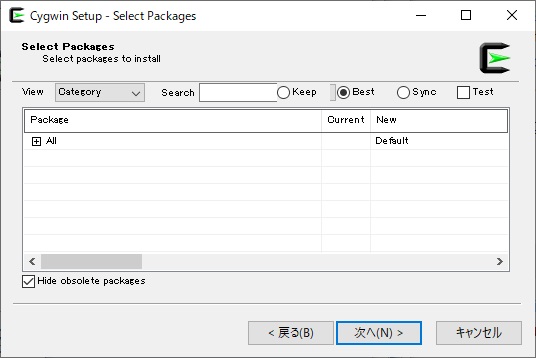 Cygwinに組み込むパッケージを選ぶため、 ここでそのメニューが表示されます。 |
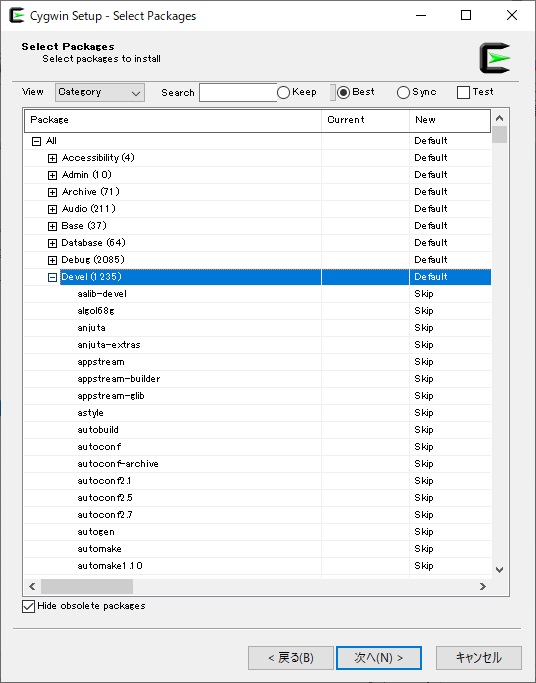 チュートリアルにはDevelカテゴリからmake、gcc- common、g++を選択するよう指示されています。 |
 ですが、Cygwinのバージョンが異なるせいか 名前が一致するパッケージを見つけられません。 |
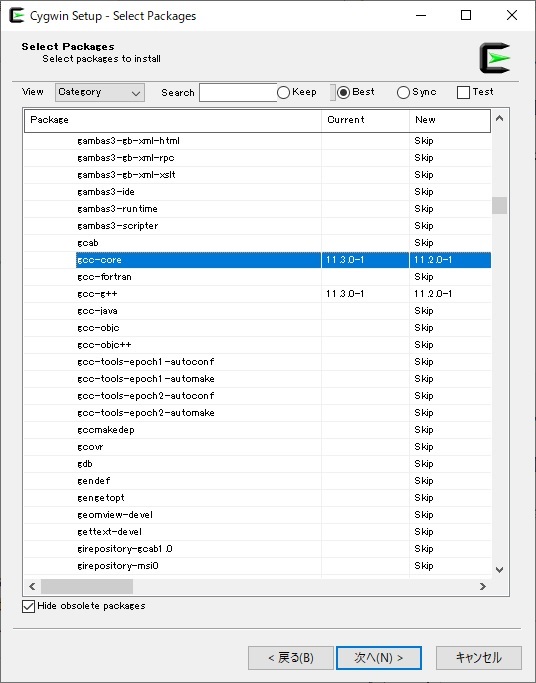
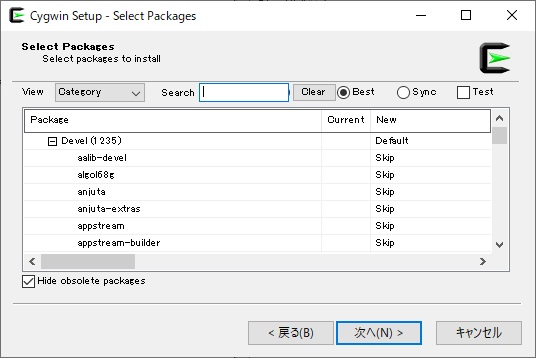 gcc-commonの代わりにgcc-coreを、 g++の代わりにgcc-g++を選びます。 |
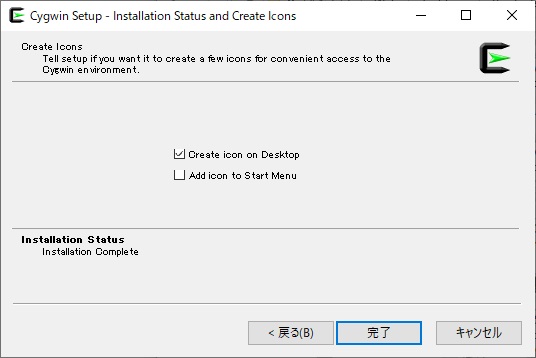 当時のバージョンに準拠しているので、仕様が変更 されているようです。一応インストール完了です。 |
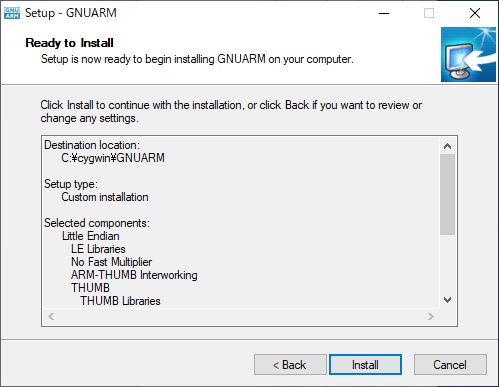
 チュートリアルの指示に沿って、次にGNU ARMをインストールします。 GNU ARMは、GCC(GNU Compiler Collection)に含まれるARM7 (ATMEL AT91SAM7S256)コアプロセッサに対応するコンパイラで、 bu-2.16.1_gcc-4.0.2-c-c++_nl-1.14.0_gi-6.4.exeは32ビット版です。 |
|
 インストーラを起動するとセット アップウィザードが表示されます。 |
 ほとんどNextを押して いくだけで簡単です。 |
 Cygwinからパスを通しやすくするため、セット アップフォルダをC:¥cygwin下に変更します。 |
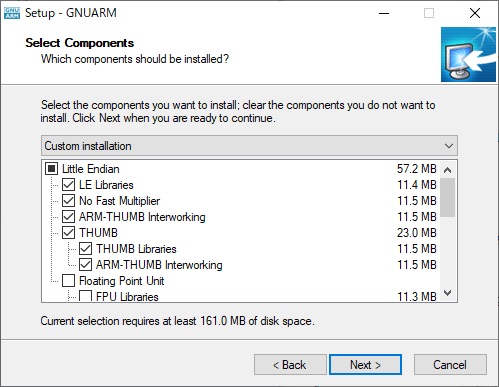 Select Componentsの画面で Big Endrianのチェックを外します。 |
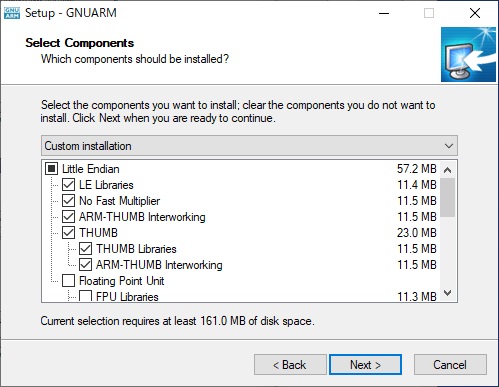 また、Little Endian内Floating Point Unitのチェックも外します。 |
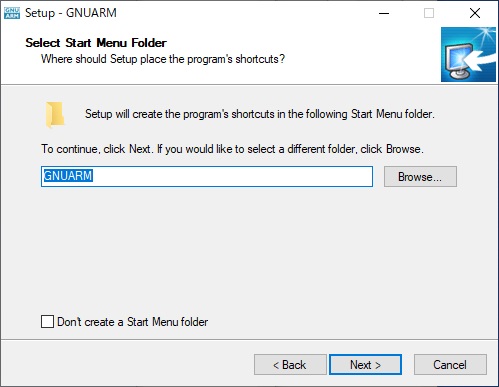 スタートメニューフォルダの有無と フォルダを置くディレクトリを指定します。 |
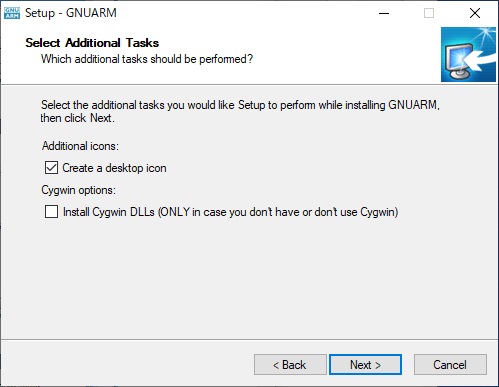 Select Additional Taslsの画面で、Install Cygwin DLLのチェックを外します(インストール済)。 |
 必要な設定が完了し、実際に インストールが実行されます。 |
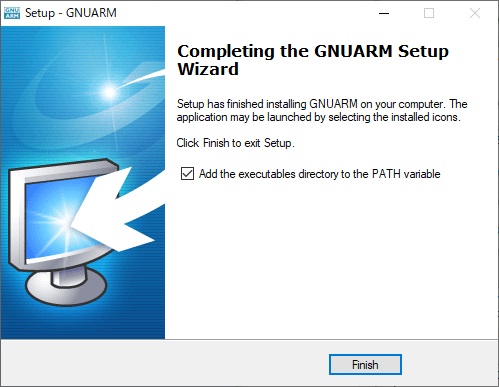 インストール完了時、Add the executable directory the PATH valuableのチェックは必要ないそうです。 |
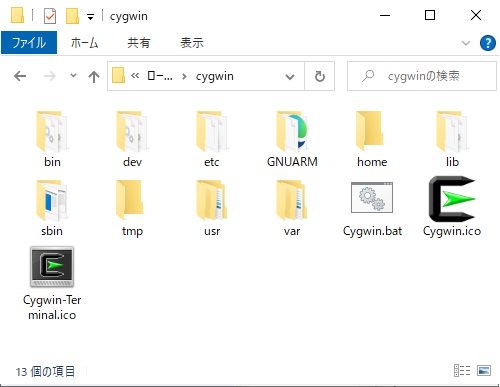 C:cygwin下にGNUARM フォルダが作成されています。 |
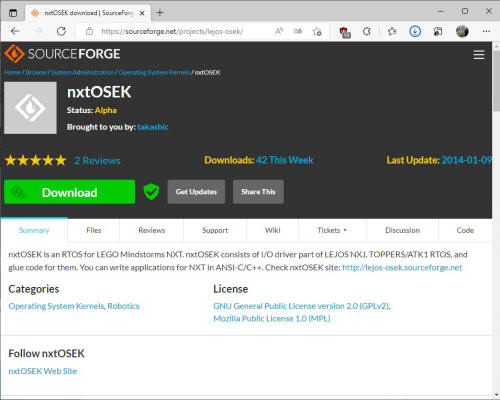 Windows環境に慣れた感覚では、聞き覚えの無い用語や システム構成に戸惑うばかりです。現時点で何を作業して いるのか見失うこともしばしばです。次に、NXTを制御する 本体であるnxtOSEKをインストールします。v214b3が 最新バージョンと表示されていますが、v218をDLします。 |
|
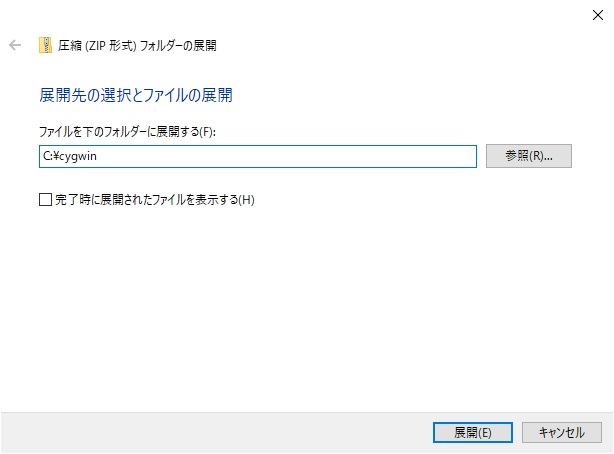 インストールと言っても圧縮ファイルを フォルダを指定して展開するだけです。 |
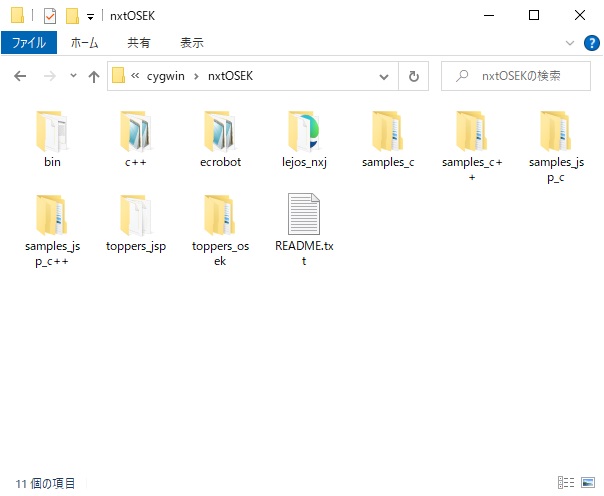 Cygwinからのディレクトリ移動がしやすい よう、C:¥Cygwin下に展開します。 |
 まだNXT Driver、NeXTTool、拡張ファームウェア等々 インストールが続きますが、一度Cygwinを起動してみます。 |
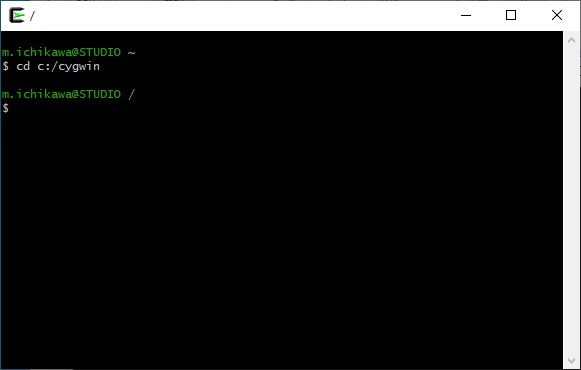 問題なく起動しプロンプトが表示されます。 正常にインストールされているようです。 |
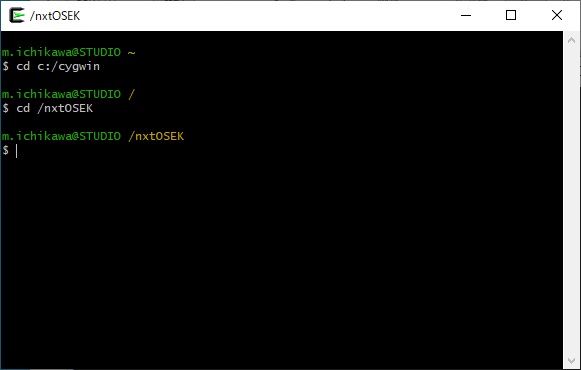 cdコマンドによりnxtOSEK フォルダに移動します。 |
 nxtOSEKインストール時に、CやC++の サンプルプログラムが用意されています。 |
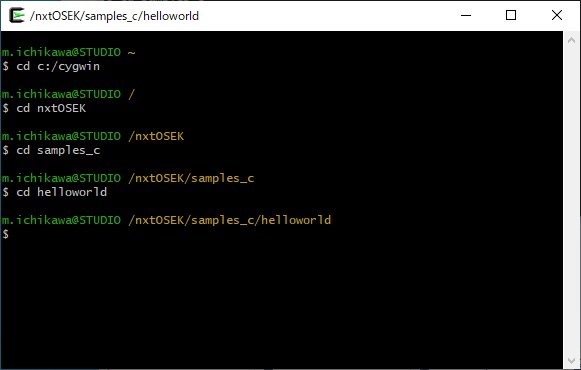 samples_c/helloworldに移動 します。有名なテストプログラムです。 |
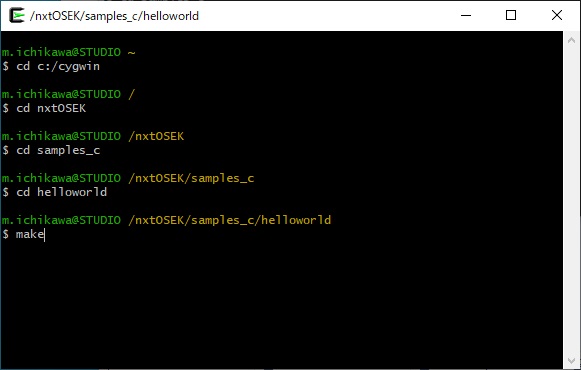 makeコマンドを組込み済なのでビルド処理(コンパイル)され 実行ファイルhelloworld_OSEK.rxeができるはずですが、 |
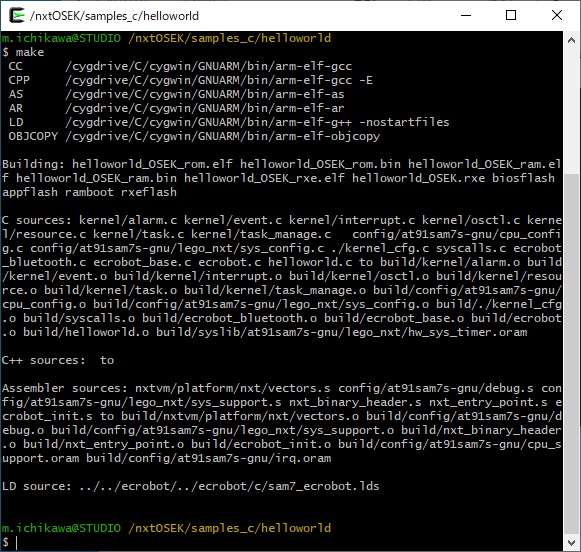 何やら・・どころか全く訳の分からない状況です。画面一杯に メッセージ(多分エラーコメント)が表示され、実行ファイルが 生成された気配はありません。コメントを理解できれば問題の 原因や対処方法が分るでしょうけれど、そもそもLinuxOSの 操作方法を最低限理解もせず、チュートリアルに頼っての環境 構築などそもそも無謀です。さて、無謀のままでメッセージの 解読に挑むか、最初からセットアップをやり直すか、心機一転 LinuxOSの操作方法から学ぶか、どれもお先が暗いです。 |
|
|
|
|