|
|
| ・4足歩行ロボットの組み立て その3(2018.5.14) |
| 5.動力ユニットの取り付け | |
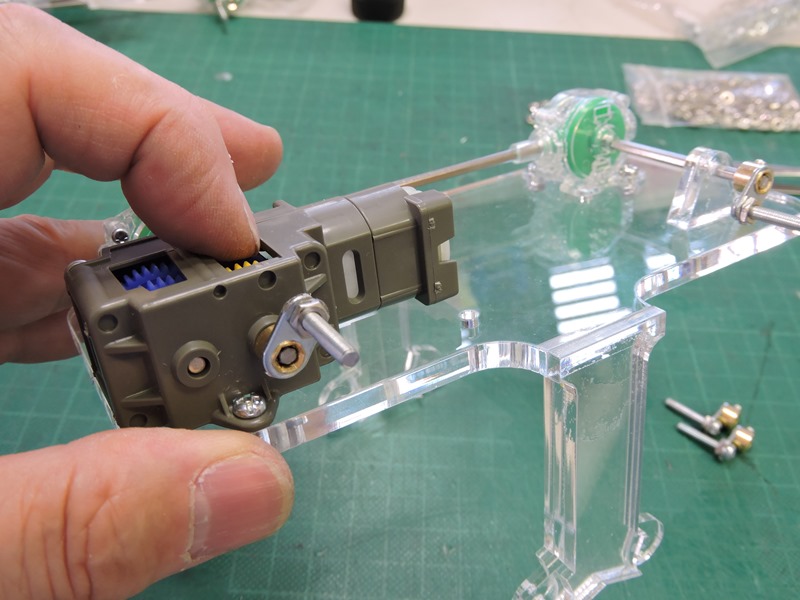
 組み立ての完了している動力ユニット(ギヤボックスと シャフトドライブユニット)をベースプレートに取り付けます。 |
 ベースプレートには予めネジ穴が加工 されています。ナットを締め込みます。 |
 動力ユニットの取り付け完了です。アクリル 板を通して機構を観察することができます。 |
 前脚側は駆動シャフトの軸受けが片側に 付いていません。部品を追加します。 |
 5mm厚アクリルを2枚重ね、ベースプレート 端から10mmの位置に取り付けます。 |
 ピンセットで接着剤を流し込み ベースプレートに固定します。 |
 リンクの重要な要素であるクランクを製作します。 TAMIYA製クランクアームを利用します。 |
 樹脂製部品の方が扱いやすいのですが、 強度とサイズの問題から金属製を選びます。 |
 必要なクランク長は5~6mm、最も内側の 穴を利用した場合で6.5mmになります。 |
 ボルトカッターで不要な 部分を切り詰めます。 |
 グラインダーで切断部の形を整えます。切削対象と 砥石径のバランスが悪く、やや危険を伴います。 |
 穴の形状に合わせて外周を 整えました。バリが残っています。 |
 ヤスリを当ててバリを取り除きます。 面倒な手作業に頼るしかありません。 |
 この仕様の部品が市販品に用意 されていると有難いのですが・・ |
 クランクとなるネジを通し ナットで強く固定します。 |
 駆動軸端に取り付けます。前脚と後脚で互いに 180度の逆位相とし、固定ネジを締め込みます。 |
 反対側の前後脚にもクランクを取り付けます。 左脚と右脚も互いに180度の逆位相とします。 |
 固定ネジが内側を向くので六角レンチが 入りません。ギヤを回して方向を変えます。 |
 電源コードとして、あらたに 赤黒のペアコードを用意します。 |
 動力ユニットを検討する際、六角シャフトが使用されている ものを選びました。クランクの位置が決めやすいからです。 |
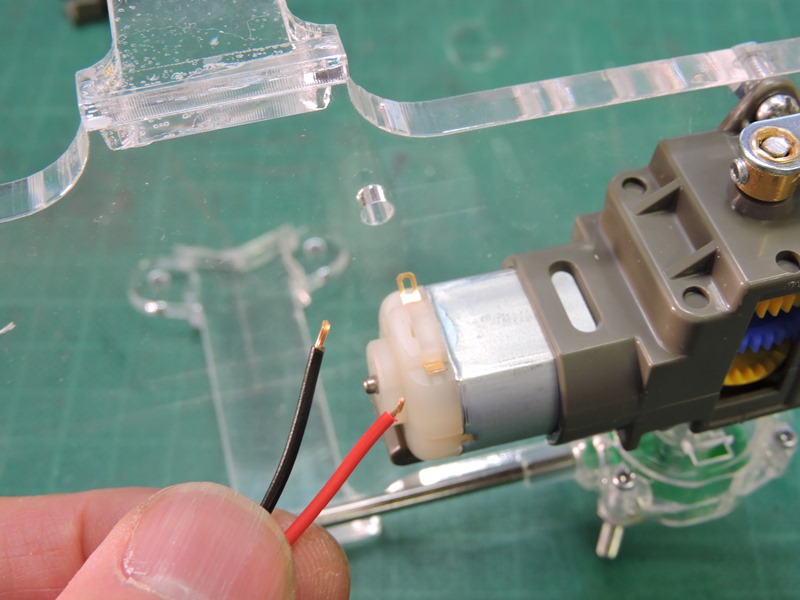 動力ユニットの取り付けを終え、 モーターへの配線を作業します。 |
 2本のビニル線を半田付けし、ベース プレートに加工された穴に通します。 |
 ギヤボックスに付属しているカバーを取り付け、半田付け部分を保護します。 配線の先は単純に乾電池ホルダーに接続するのみとします。リンクを応用し 4足歩行する機構を理解することに主眼があるので、電気的制御は不要です。 |
|
| 6.前脚・後脚(リンク)の取り付け~完成 | |
 動力ユニットが実装されたベースプレートに 既に出来上がっている脚を取り付けます。 |
 ワッシャーを介し、クランク軸を 連接棒(下腿)の穴に通します。 |
 従動節(大腿)の上端を、サポートの接続部に 差し込みます。ほとんどガタが出ません。 |
 ネジを入れ、接続部が自在に回転できる (遊びがある)状態で固定します。 |
 ワッシャーを介し1枚目のナットを入れます。 これだけでは回転(揺動)に伴いネジが緩みます。 |
|
 もう1枚ナットを重ね、 ダブルナットとします。 |
 クランク軸のネジが突き出ている部分です。 ワッシャーを介してダブルナットをかけます。 |
 脚となるリンクが組み上がりました。リンク機構を実装する場合、接続部の 剛性をいかに確保するかが課題です。特に、リンクが本体の支持構造を 兼ねていると、全体の強度を低下させるボトルネックになりなりかねません。 |
|
 自立歩行させるには、電源を 搭載させる必要があります。 |
 やはりTAMIYAの製品から、単3電池ボックス (2本用/スイッチ付き)No.151を利用します。 |
 開封し中から取り出した部品です。 かなり細かな金具類が含まれます。 |
 電池ホルダー部と切り替え スイッチ部を各々組み立てます。 |
 両者を合体させて完成です。 ほとんどのネジとビニル線は余ります。 |
 ベースプレートへの固定は 強力両面テープを使います。 |
 モーターを含むギヤユニットが後方に配置されているので 重心位置も後方に偏っています。電池ホルダーを前方に 取り付けることで、重心位置を本体中心付近に修正します。 |
|
 ベースプレートから出ているモーターの 配線を、電池ホルダー端子へ引き寄せます。 |
 両極とも半田付けで接続します。このスイッチの デザイン、確か過去40年ほど変わらないのでは・・ |
 組み立て作業が終わり4足歩行ロボットの完成です。リンクの接続部を 多く含む割に全体が十分堅牢です。片側の前後脚に含まれるリンクは、 同一平面上で動作する必要があり、歪みがあると動作抵抗を生じます。 |
|
 クランクアームの固定ネジをいったん緩め、固定位置を微妙に調整することで リンクを同一平面上に揃えます。接続(回転)部に少量の潤滑剤を入れます。 4足歩行ロボットの組み立て その2へ |
|
|
|
|