|
|
| ・Mindstorms NXT挑戦3(2022.10.22) |
 Lego MindstormsをnxtOSEKにより自在かつ高度に制御することを 目標に、開発環境の構築を目指しています。Windows上にUNIX環境を 再現するため、Cygwinに代わりWSL(Windows Subsystem for Linux)を介しUbuntuを組み込むことで、Lego MindstormsNXT上で 簡単なプログラム(helloworld.c)を実行させることに成功しています。 この環境下でnxtOSEKを利用できるか、つまりNXTのアクチュエータや センサーを制御できるか、チュートリアルに沿って作業を進めます。 |
|||||||
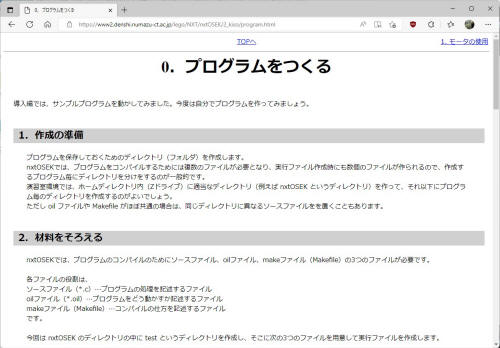
 nxtOSEKのファンクションを呼び出す前に もう一つ簡単なプログラムを試してみます。 |
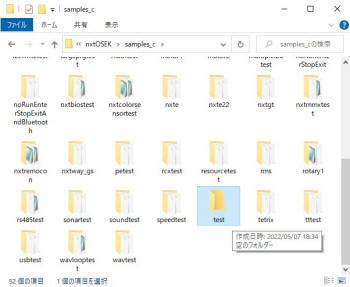
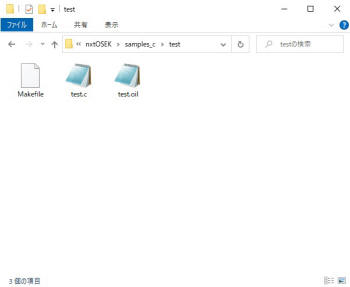 samples_cフォルダ内にtestフォルダを作成し、Makefile、 test.c、test.oilの3ファイルを以下の通り保存します。 |
||||||
消去(display_clear(0);)し、カーソルを(5、3)に移動(display_goto_xy(5,3);)、 "TASK1"と表示(display_string("TASK1");)して1秒間待ちます(systick _wait_ms(1000);)。再び表示を消してからカーソルを(5、5)に移動させ、 "TASK1"と表示して1秒間待ちます。この処理を繰り返します(while(1){)。 |
|||||||
プログラムの実行の仕方を変えることができるそうです。拡張子の oilはOSEK Implementation Languageの略です。実行環境が同じ なので、前回の作業で使用したhelloworld.oilをコピーしファイル 名のみを変更してtest.oilとすることでそのまま利用できます。 |
|||||||
SOURCES、TOPPERS_OSEK_OIL_SOURCEの記述を 実行するプログラム名に一致させます。’test’に書き換えます。 |
|||||||
(NXTOSEK_ROOT)はnxtOSEKがインストールされたルート ディレクトリを指定しているので、簡単に../..で代用させます。 |
|||||||
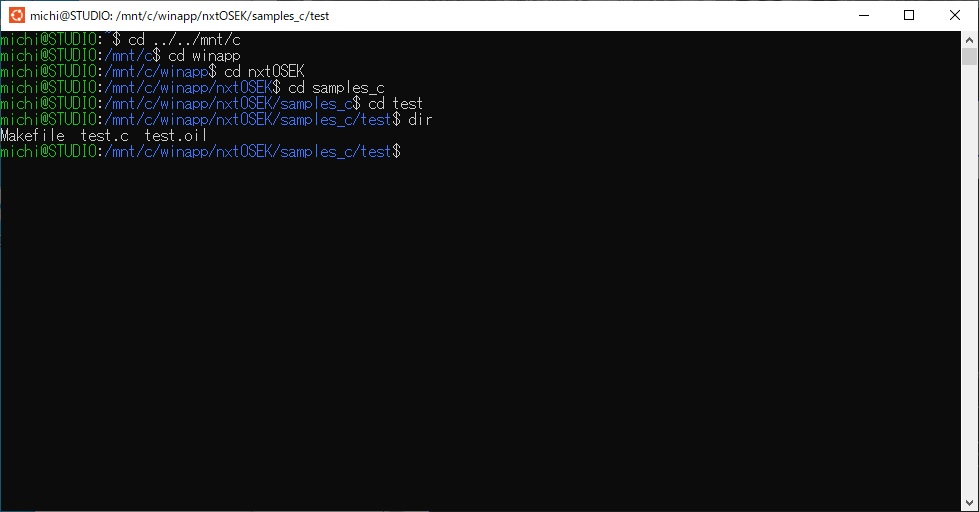 Ubuntuを起動しtestディレクトリに移動します。dirコマンドに よりフォルダ内のファイルを表示させると、先ほど用意した Makefile、test.c、test.oilの各ファイルが確認できます。 |
|||||||
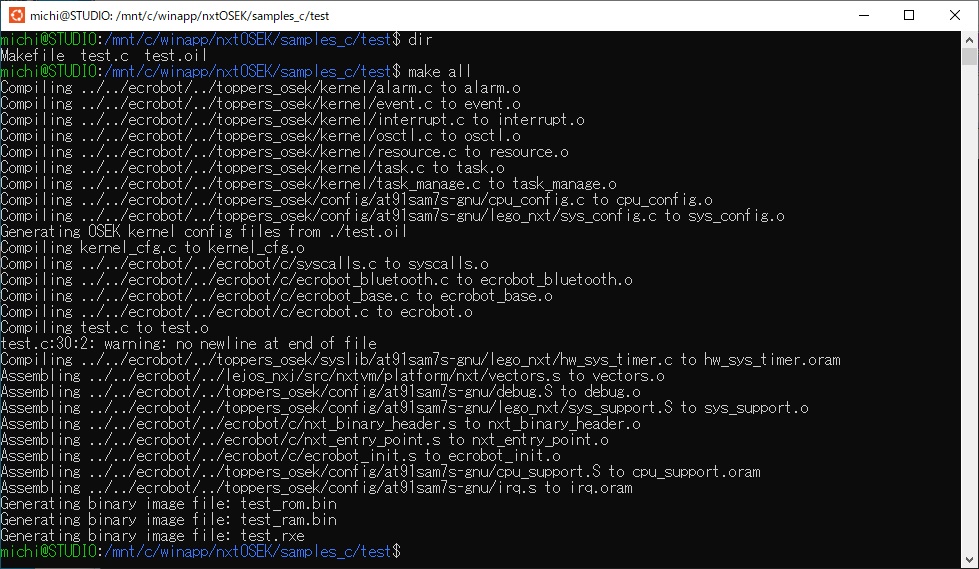 make allコマンドによりtest.cをビルド(コンパイル)します。 エラーなく最後に実行ファイルtest.rxeが生成されています。 |
|||||||
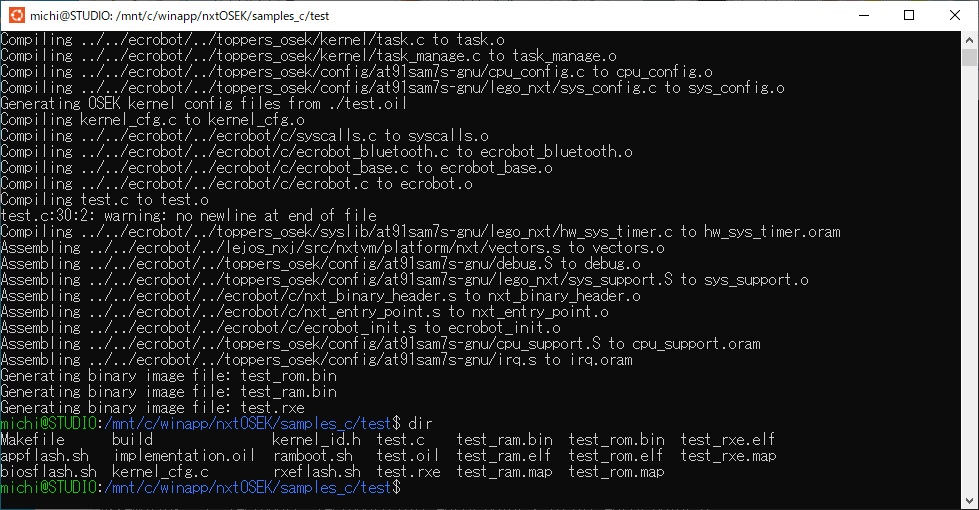 dirコマンドでもう一度フォルダ内のファイルを表示させると、 test.rxeを含む一連のビルドファイルが確認できます。 |
|||||||
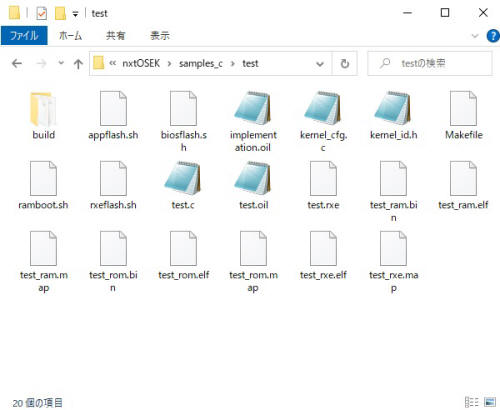 同じくtestフォルダをWindows上で表示させてみます。 もちろんUbuntuによる表示と全く同じファイル構成です。 |
|||||||
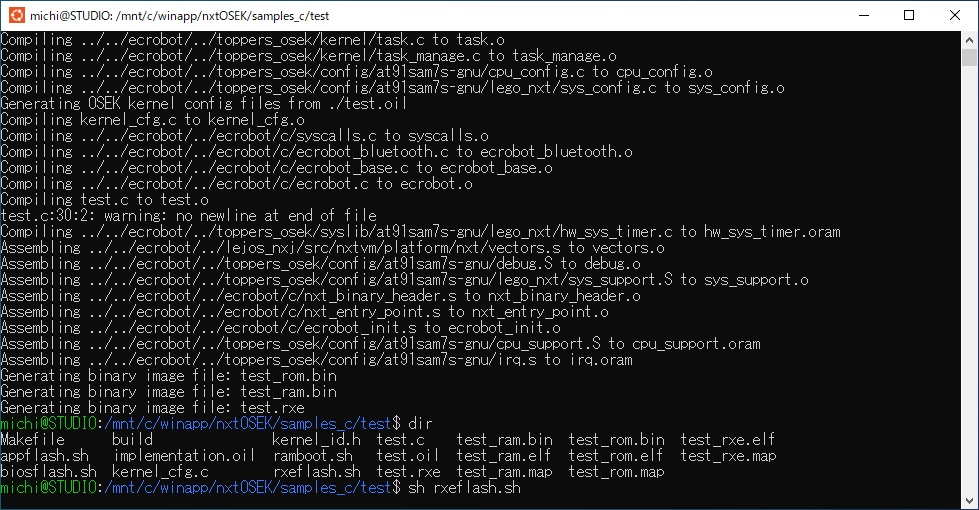 NXTを接続した状態でsh rxeflash.shコマンドを実行し 生成された実行ファイルをNXT内のメモリに転送します。 |
|||||||
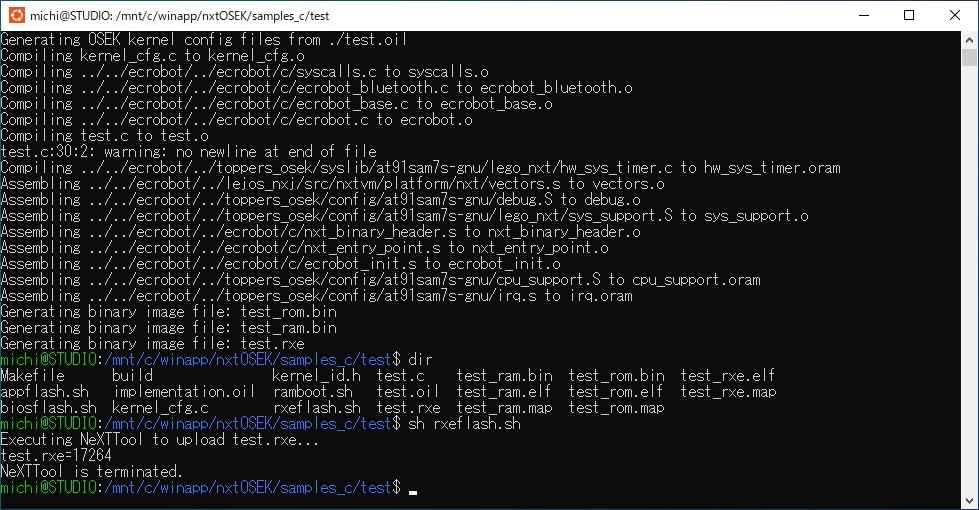 NXT本体との通信にはNeXTToolが呼び出されます。 NeXTTool is terminatedと表示されているので NXTへtest.rxeの転送は完了しているはずです。 |
|||||||
 NXT側でプログラムが登録 されているか確認します。 |
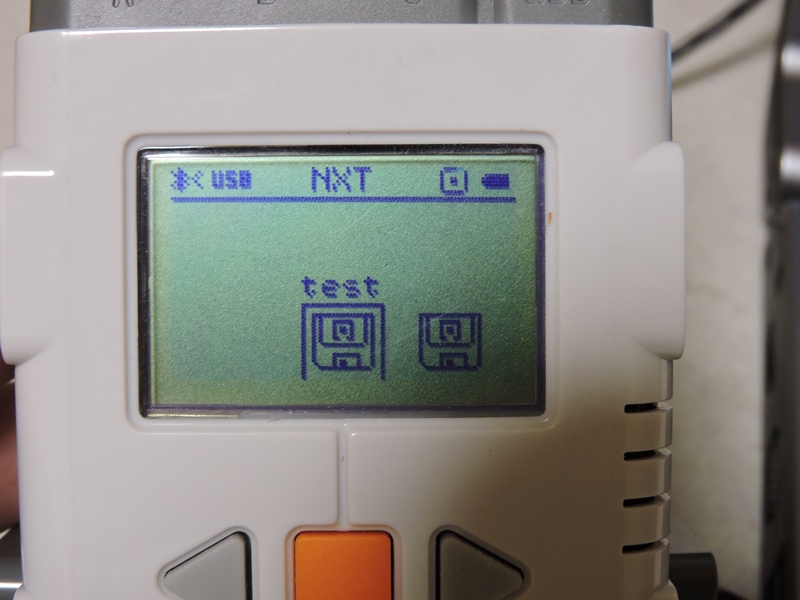 My Files → Software filesと 辿ると、testが格納されています。 |
||||||
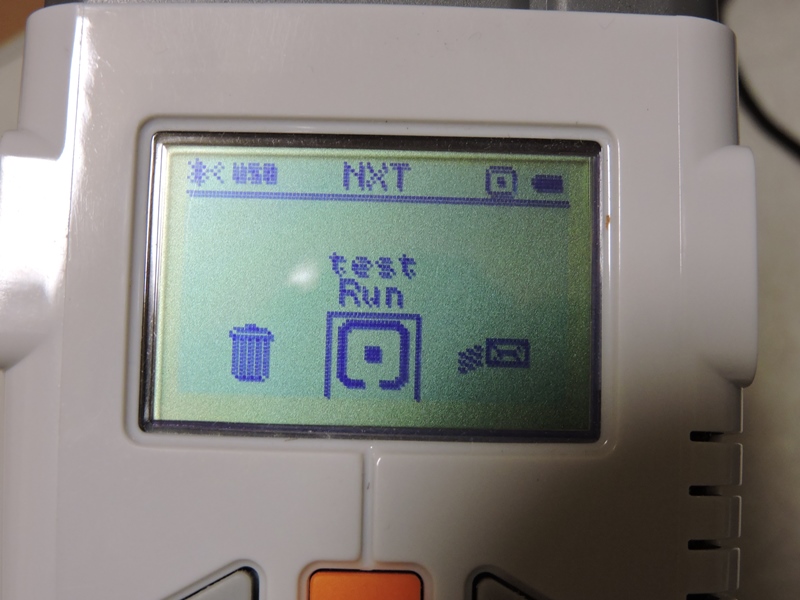 testを指定して(それしか指定 できません)、実行(Run)します。 |
 カーソル位置を変えながらTASK1と TASK2が交互に表示されます。 |
||||||
 チュートリアルを次の章に進め、モーターを制御してみます。 モーターはNXT本体からポートを介して外部に接続されます。 ディスプレイ表示や操作ボタン入力など標準的なデバイスと 異なり、nxtOSEKに実装されたファンクションがないと制御 できない領域です。nxtOSEKの本領を引き出しにかかります。 |
|||||||
 Lego Mindstorms9797に付属する マニュアルに従い2輪走行車を組み立てます。 |
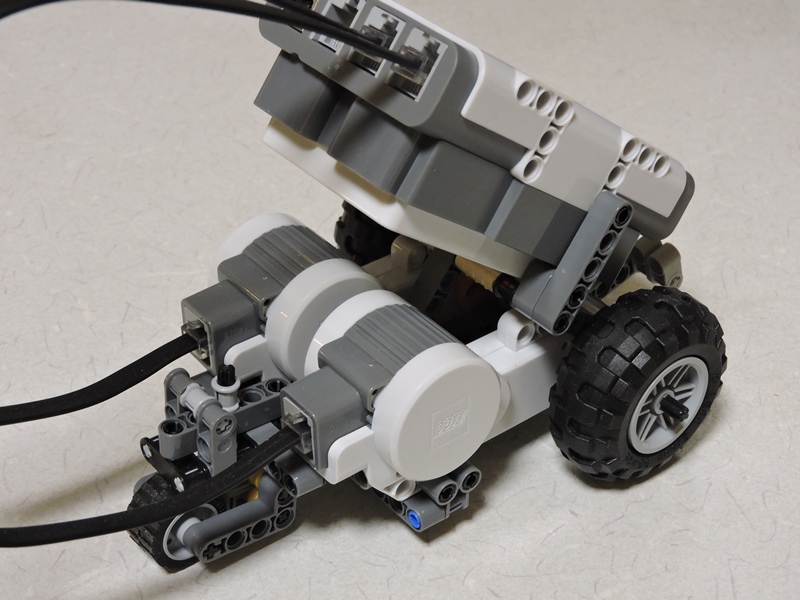 2個のモーターが左右それぞれのタイヤを 駆動します。後部に補助輪が付きます。 |
||||||
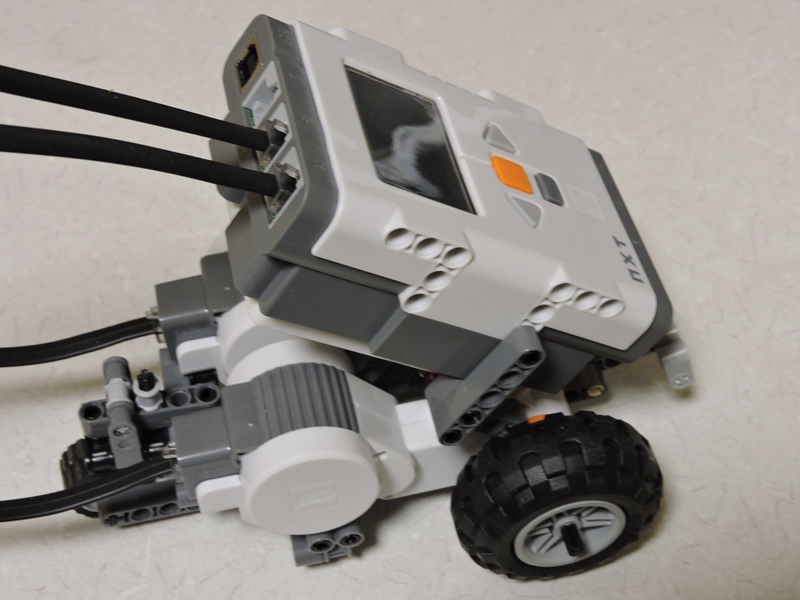 NXT本体のポートにモーターの 配線を左右とも接続します。 |
 左車輪用モーターはポートCへ、右車輪用 モーターはポートBへ接続されます。 |
||||||
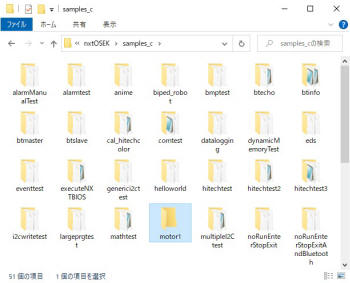 同じくsamples_cフォルダ内に motor1フォルダを作成します。 |
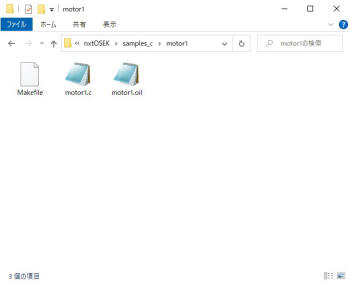 Makefile、motor1.c、motor1.oilの 3ファイルを保存し、Makefileを編集します。 |
||||||
2秒間回転させて2輪走行車を前進させます。次に1秒間 モーターを止めて停止させ、続く2秒間でモーターを逆回転し 後退させます。モーターを制御するファンクションを使います。 |
|||||||
|
|
|||||||
|
motor1.cで使用されているファンクションの説明です。 チュートリアルからの抜粋ですが、実際はもう少し詳しく 解説されています。出力はPWM制御されています。 |
|||||||
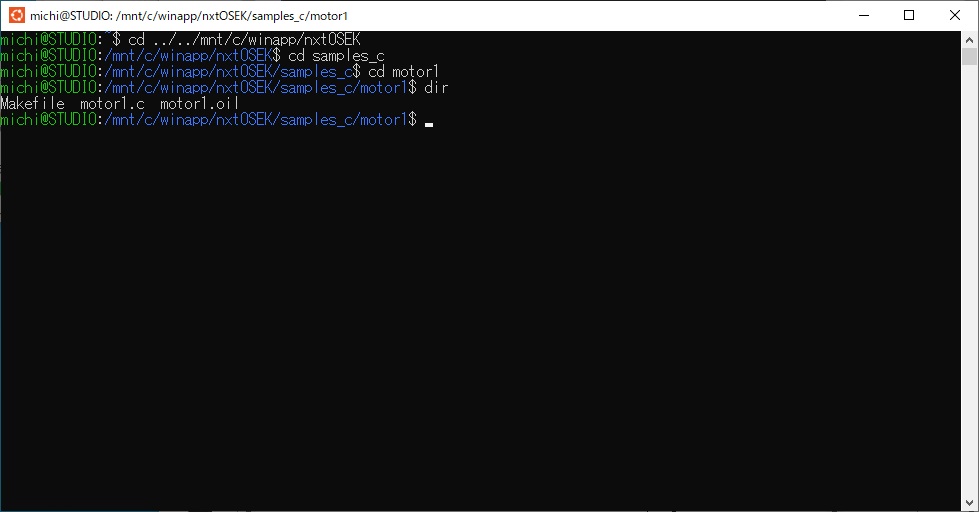 Ubuntuを起動しmotor1ディレクトリに移動します。 Makefile、motor1.c、motor1.oilが確認できます。 |
|||||||
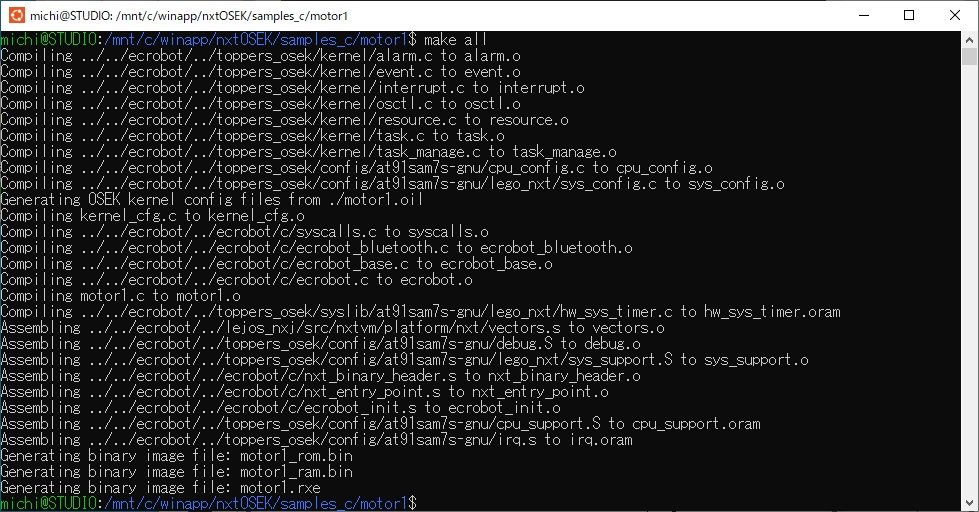 make allコマンドによりmotor1.cをビルド(コンパイル)します。 エラーなく最後に実行ファイルmotor1.rxeが生成されています。 |
|||||||
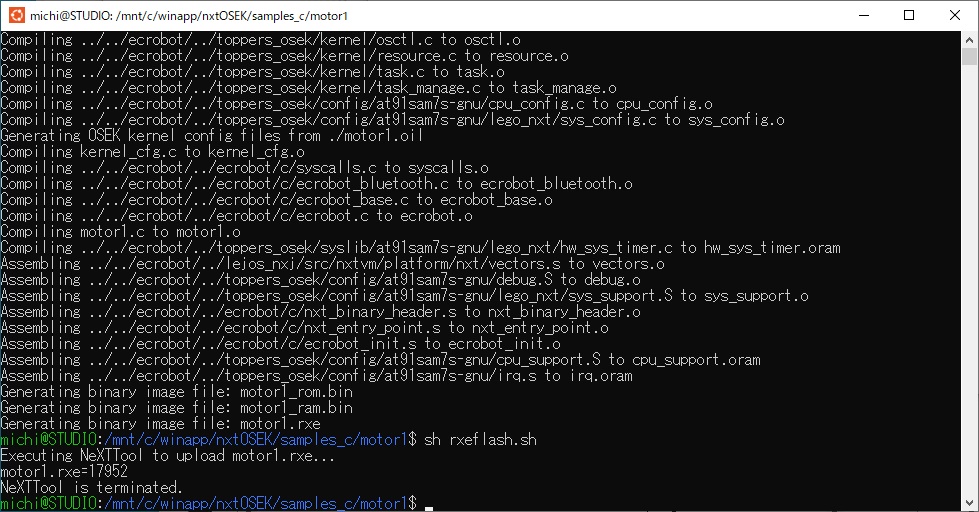 NXTを接続した状態でsh rxeflash.shコマンドを実行し 生成された実行ファイルをNXT内のメモリに転送します。 |
|||||||
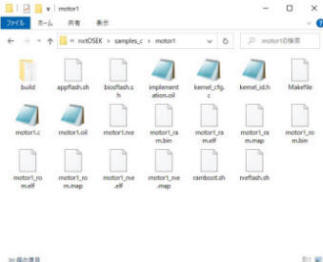 motor1フォルダをWindows上で表示します。 一連のビルドファイルが生成されています。 |
 NXT本体にもmotor1が登録 されていることが確認できます。 |
||||||
|
motor1を指定して実行(Run)します。左右のモーターが音を たてて回転し、2輪走行車が前進→停止→後退→停止します。 取りあえずnxtOSEKによりLego MindstormsNXTを制御する 基本部分の環境構築に成功したと言えるのではないでしょうか。 |
|||||||
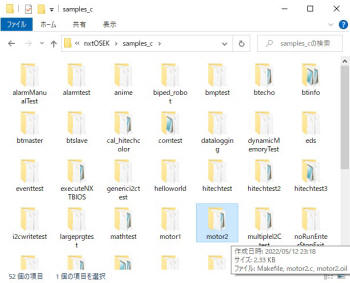 もう一つ、チュートリアルにあるnxt_motor_set_speed()を 使ったサンプルを試します。motor2フォルダを作成します。 |
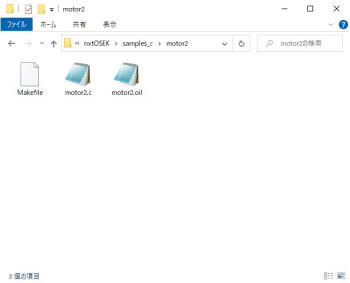 Makefile、motor2.c、motor1.oilの 3ファイルを保存し、Makefileを編集します。 |
||||||
戻るプログラムです。回転時にはポートBに-40を指定して右タイヤを 逆回転、ポートCに40を指定して左タイヤを正回転させることで走行車を 右旋回させます。旋回角度を調整しやすくするため、前進・停止・回転の 各動作時間をマクロに定義しています。動作終了後にディスプレイに ゛THAT’S ALL!゛と表示させます。多分うまく動作するでしょう。 |
|||||||
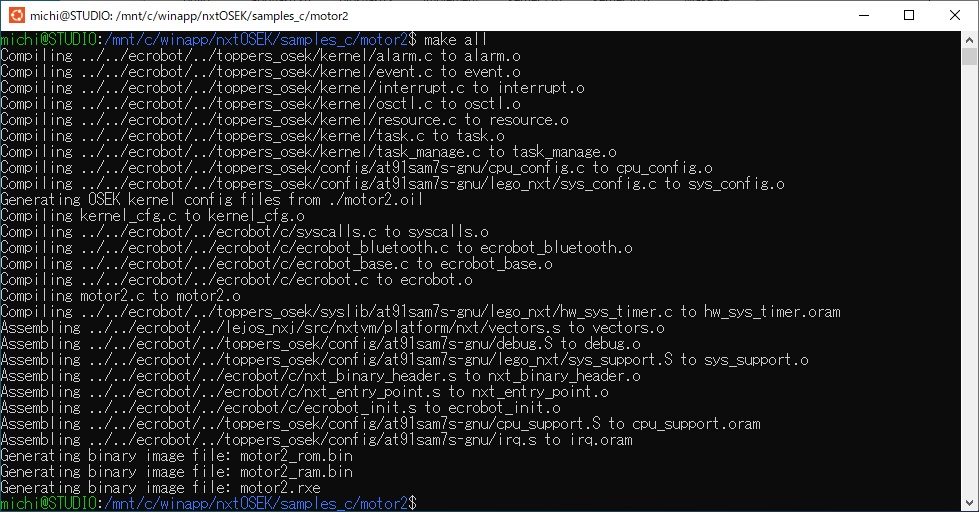 make allコマンドによりmotor2.cをビルド(コンパイル)します。 エラーなく最後に実行ファイルmotor2.rxeが生成されています。。 |
|||||||
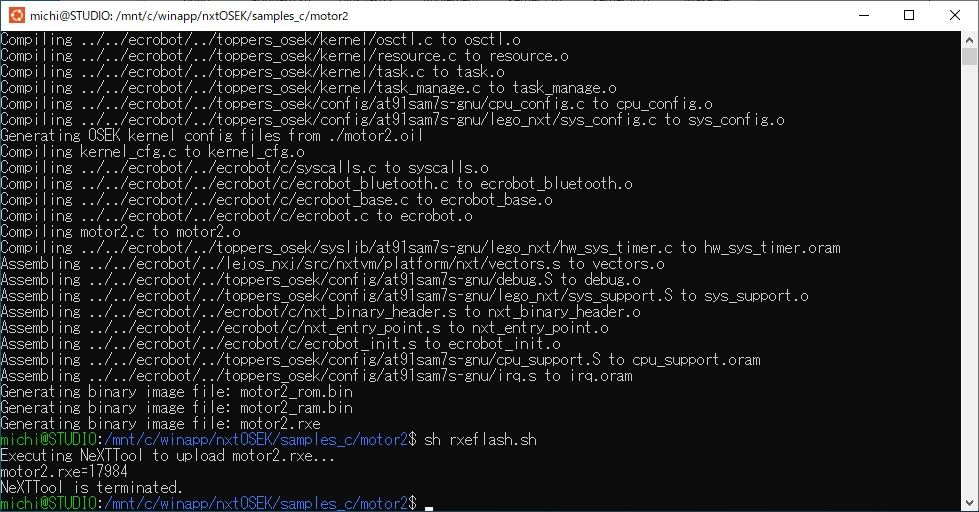 NXTを接続した状態でsh rxeflash.shコマンドを実行し 生成された実行ファイルをNXT内のメモリに転送します。 |
|||||||
|
motor2フォルダをWindows上で表示します。 一連のビルドファイルが生成されています。 |
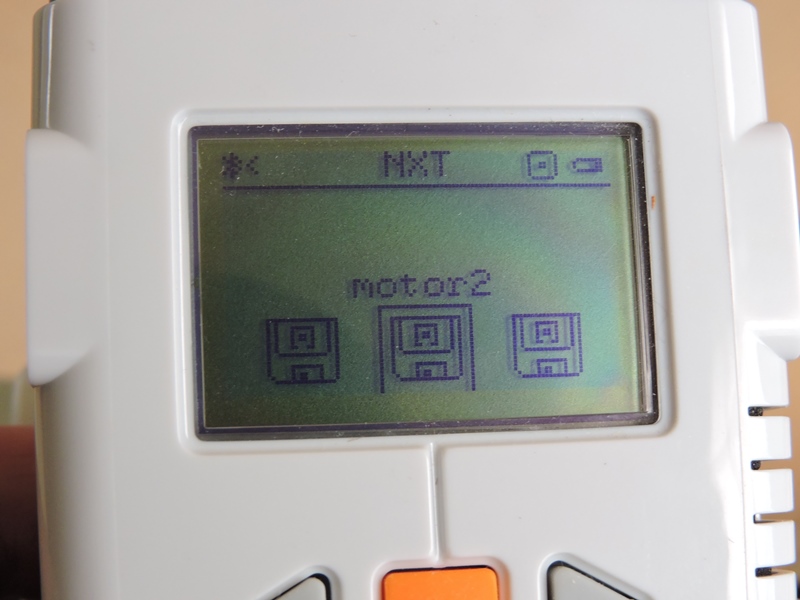 NXT本体にもmotor2が登録 されていることが確認できます。 |
||||||
|
motor2を指定して実行(Run)します。再び左右のモーターが 回転し、2輪走行車が前進→停止→回転→前進→停止を繰り 返します。残念ながら4回繰り返した結果、元の位置からかなり ずれています。対処方法は簡単なものでして、motor2.c中に 記述されている゛#define TURN_TIME 220゛の220を変更 させるだけです。右回転が足りないので220よりも大きくします。 Lego MindstormsNXTには、何と加速度センサーやジャイロ センサーといった高度な制御を実現するセンサーが用意されて います。実は、これらの環境を利用してどうしても挑戦したい 課題があるのですが、その前にNXTおよびnxtOSEKの扱い 方を十分に習得しておきたいものです。続編にご期待下さい。 |
|||||||
|
|
|||||||