|
|
| ・4足歩行ロボットの組み立て その2(2018.5.14) |
| 4.前脚・後脚(リンク)の製作 | |
|
4足歩行の原理は、動力ユニットのシャフトに取り付けたクランクが連接棒と従動節を揺動する いわゆる「てこクランク機構」が、前後脚・左右脚を互いに180度の位相を持って駆動することに よります。もし各脚がリンク揺動平面以外の方向に剛性を欠くと歩行が不安定となり、逆に剛性を 高めようと接続(回転)部の遊びを限定すると、摩擦による抵抗が無視できなくなります。多くの 既存モデルがこの問題を抱えており、リンク機構の実装方法に工夫を凝らす必要があります。 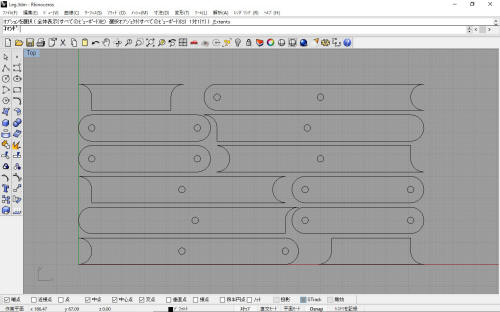 プロトモデルの段階で確立したのが、3mm厚アクリル板を3枚重ねる構造とし、 接続(回転)部で一方の1枚を他方の2枚が挟み込む方法です。接続(回転)部に 一定の遊びを与えても、リンク揺動平面以外の方向に対する剛性が保たれます。 *画像を右クリックしてDXFファイルをダウンロードできます。 |
|
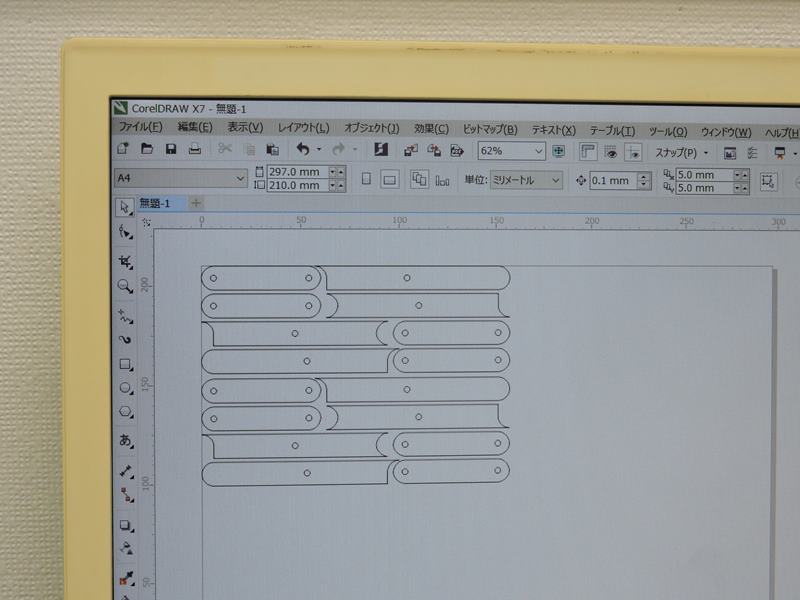 DXFファイルをCorelLaserに 送り、必要な部品を製作します。 |
 3mm厚アクリル板は15mm/秒 程度の速度で切断出来ます。 |
 重ね合わせる3枚のうち、外側の2枚と 中心の1枚で材質(色)を別のものにします。 |
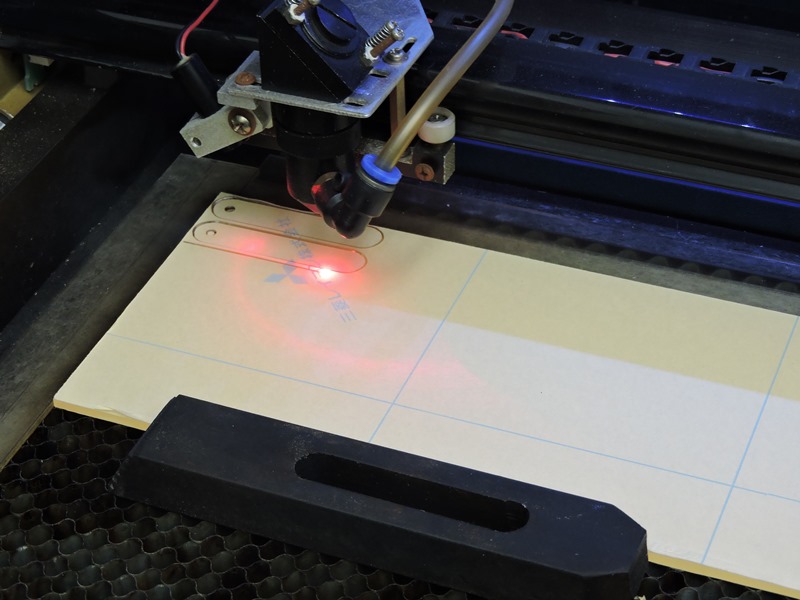
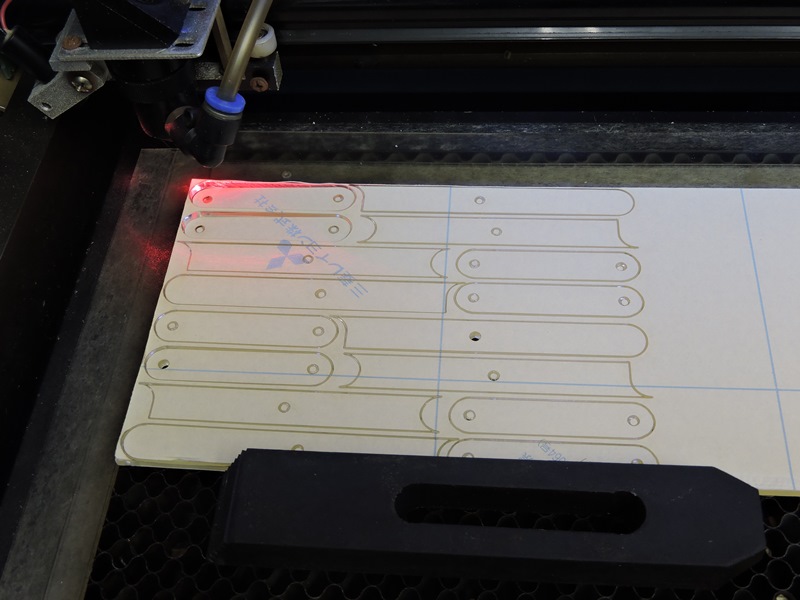 先に外側に使用する部品を、 透明アクリル板から切り出します。 |
 接続部での剛性を低下させないため、回転範囲に 含まれない部分は極力材料を残してあります。 |
 続いて中心に挟み込まれる部品を 製作します(DXFファイルは共通です)。 |
 3mm厚黒色のアクリル板を使用します。透明 アクリル板で挟むことでデザイン性を向上させます。 |
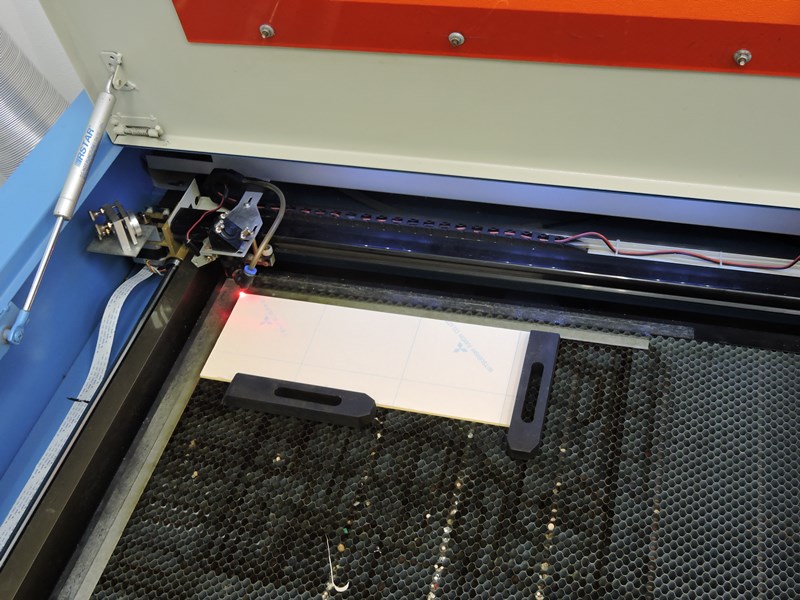
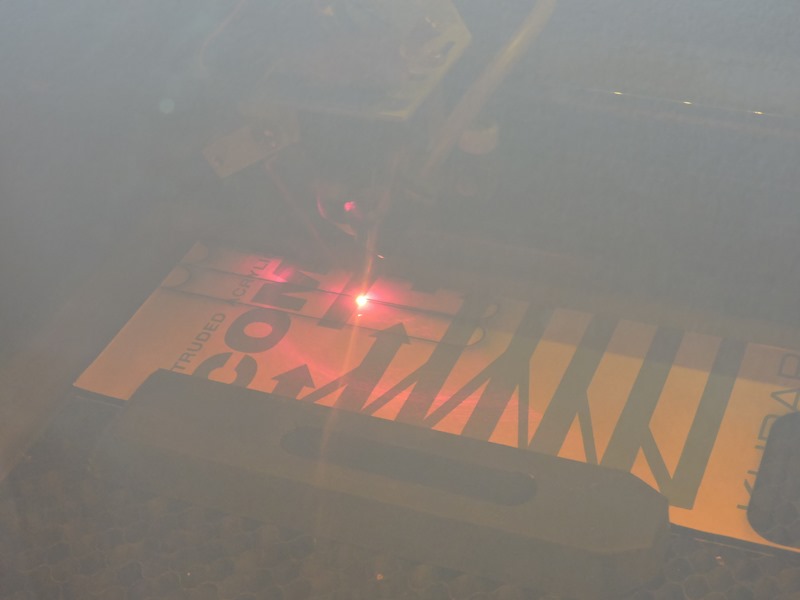 レーザー加工機のカバーを閉じた外側から撮影して います。2段のファンにより有害ガスを排気します。 |
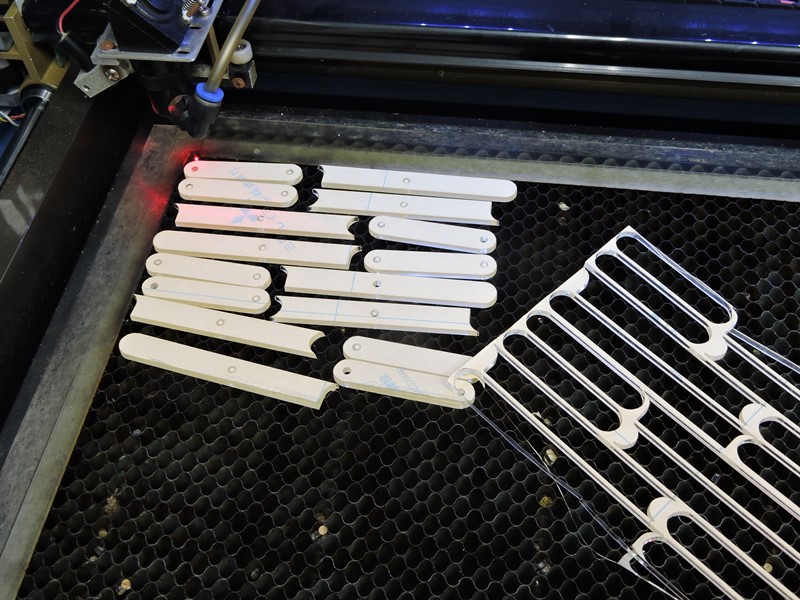
 中心に挟まれる黒色アクリル製部品を切り出し ました。ここでも端材を無駄なく利用します。 |
 前後・左右4脚分の製作に 必要な全部品です。 |
 表裏の保護シートを剥がします。剥がし難いのは 切断線に沿って溶着が起こっているためです。 |
 組み立て前の準備が 全て整いました。 |
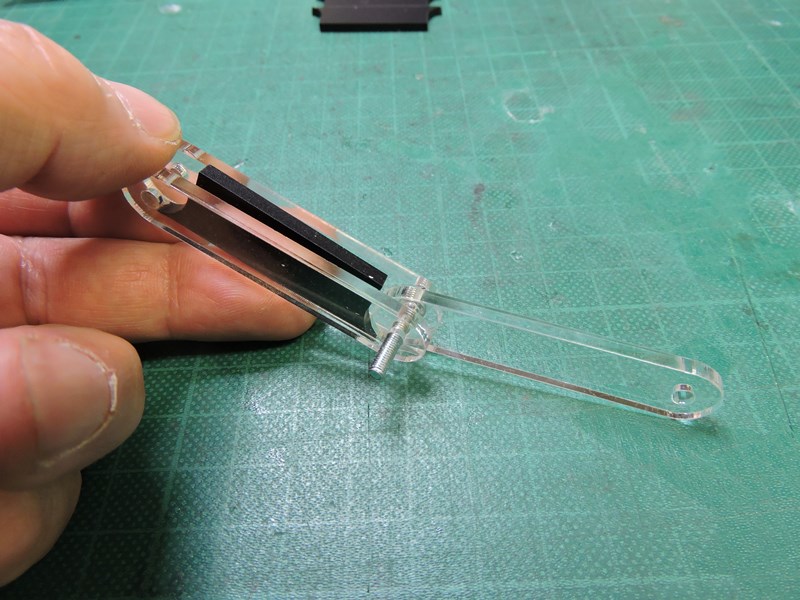
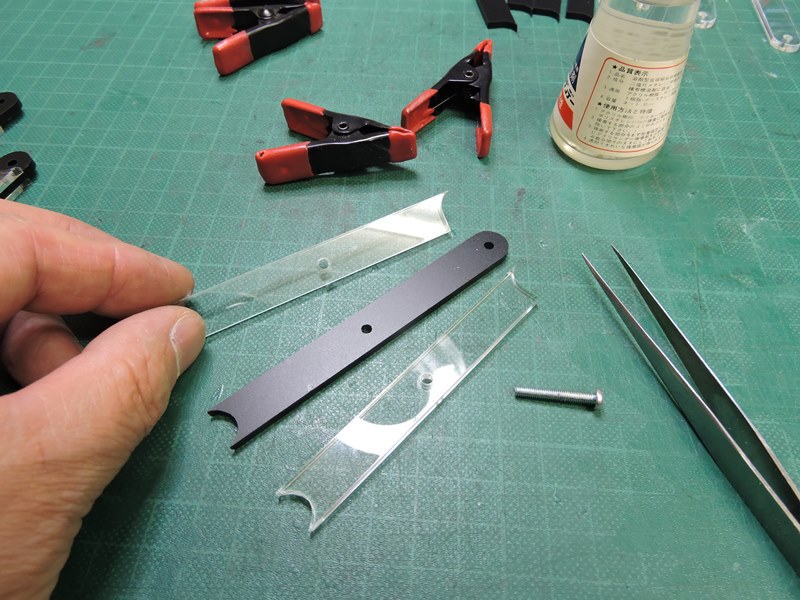 下腿に相当するリンク(連接棒)です。黒色 部品を中心に透明部品で外側を挟みます。 |
 中ほどにクランク軸が通る穴が開いています。 位置を正確に合わせるためネジを通しておきます。 |
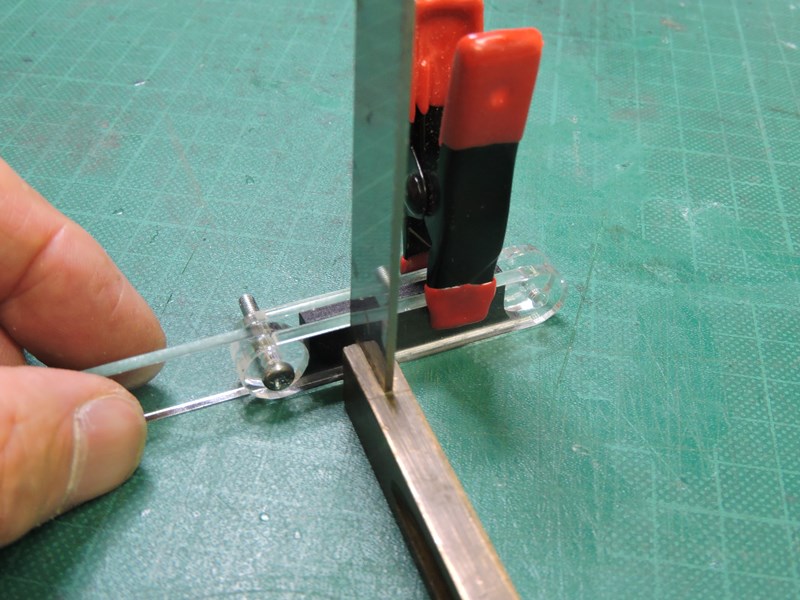
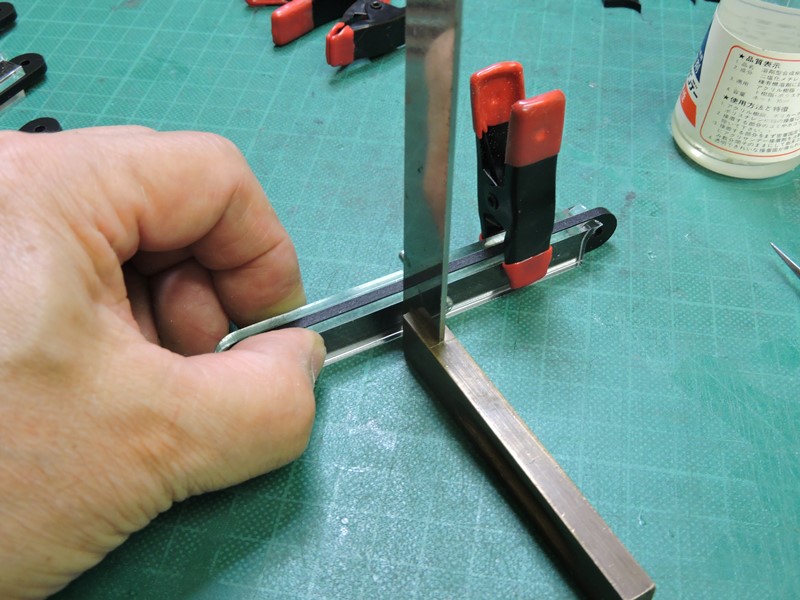 穴が一致しつつ3枚とも垂直に並ぶよう、 スコヤを当てて修正しクリップで固定します。 |
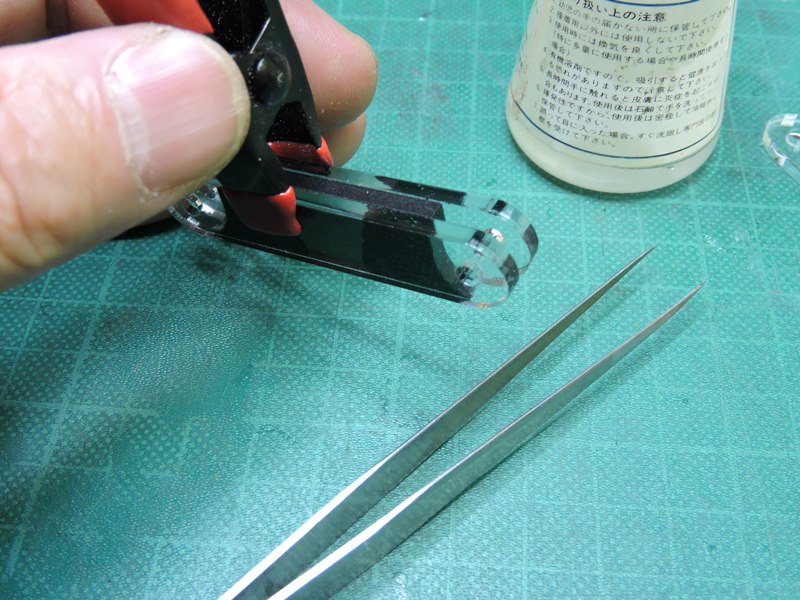
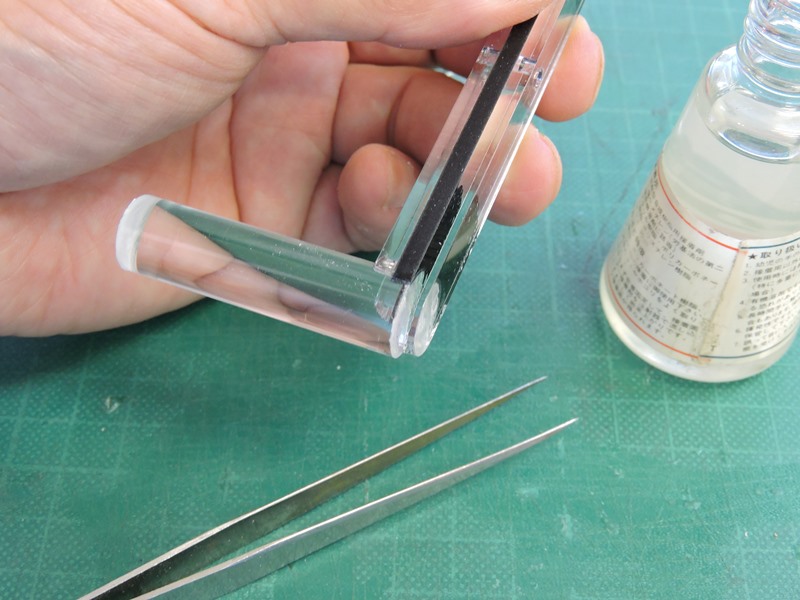
 接着剤に付属する専用スポイトは、まるで 役に立ちません。小型のピンセットが便利です。 |
 ピンセットの隙間に接着剤を含ませ、 部品の接合端に少量注ぎます。 |
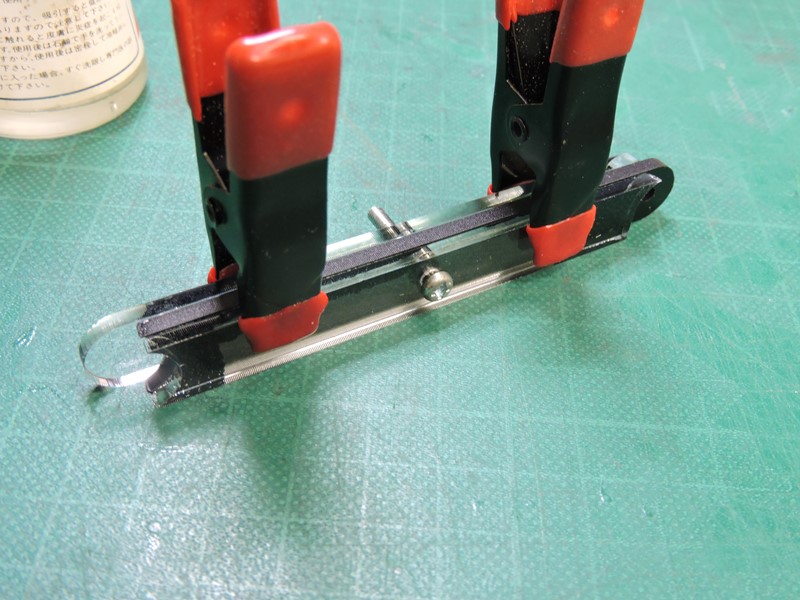 ほとんど瞬間的に接着しますが クリップで数分間保持します。 |
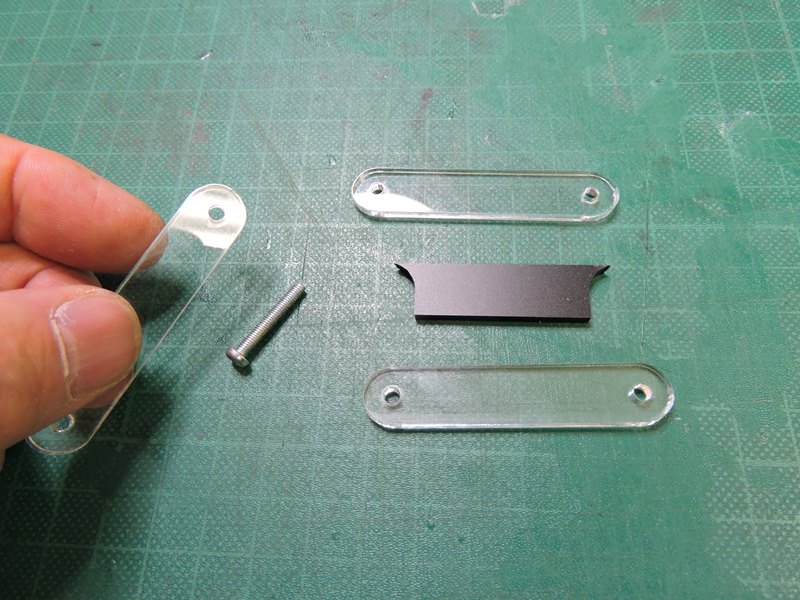 大腿に相当するリンク(従動節)です。この 3枚の位置合わせには注意が必要です。 |
 両端がともに接続(回転)部となるため、中心に挟む 部品の位置を正確に合わせる必要があります。 |
 接続する相方の部品とともにネジを通して おきます。スコヤを当て垂直に揃えます。 |
 クリップで押さえたまま 接着剤を流し込みます。 |
 反対側からも接着剤を入れます。接合面 全体には行き渡りませんが強度は十分です。 |
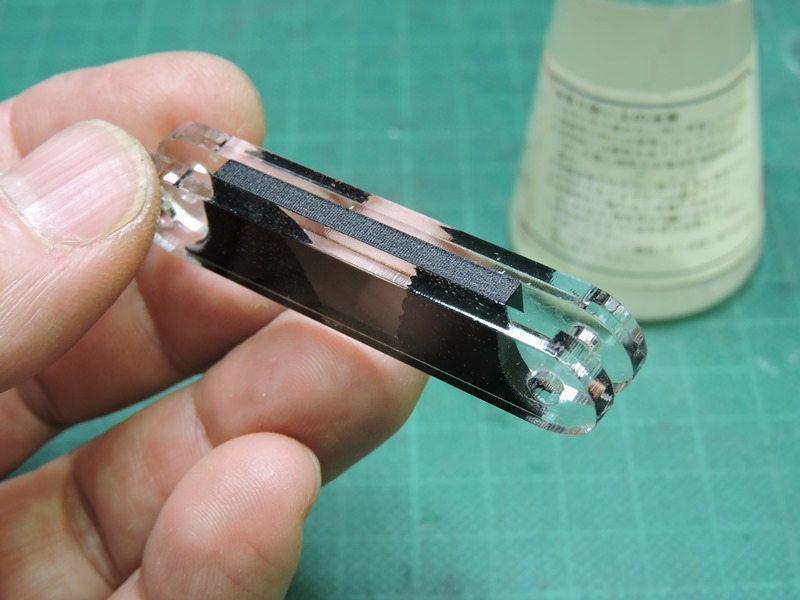 中心の黒色、外側のクリアから成る メカニカルな印象の脚部品です。 |
 4脚分の部品(リンク)が用意出来ました。ところで、歩行時は一瞬を除いて 2脚で接地する状態が続きます。下腿の先端(接地部分)が「点」であると 2点接地となり自立できないことになります。対策を考えなければなりません。 |
|
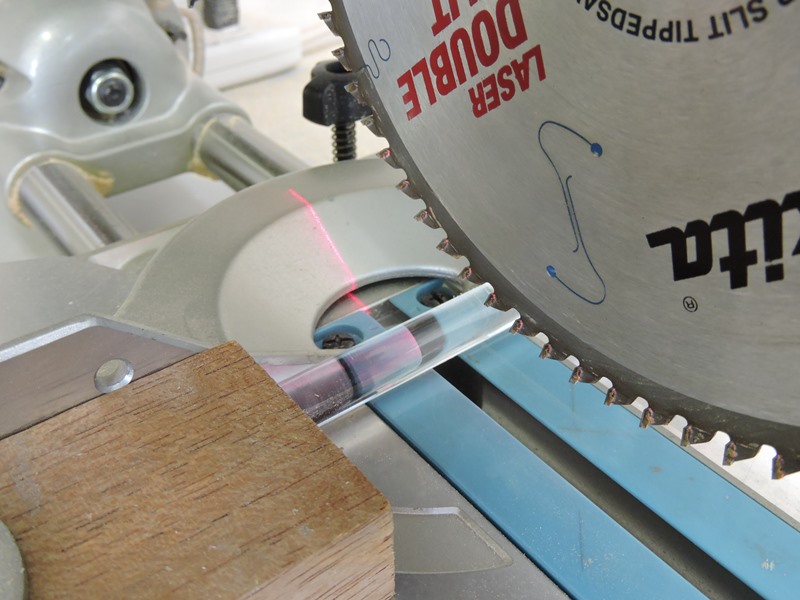 12mm径のアクリル棒材を用意します。 44mmの長さに4脚分切り揃えます。 |
 スライドソーの汎用チップソーで切断すると かなり発熱し、切り口の周囲にバリが残ります。 |
 バリを丁寧に取り除き、下腿先端の 円形切り欠き部分に取り付けます。 |
 スライドソーにより切断面は長さ方向に 対して正確な垂直を保っています。 |
 密着した状態で接着するだけで 正確に組み立てられます。 |
 自立補助用のアクリル棒を取り付けたことで、対角 方向に並ぶ2本の「線」で常時接地することになります。 |
 下腿に相当する連接棒、大腿に相当する 従動節、2本のリンクをネジで接続します。 |
 ネジ穴位置の誤差を解消するため、 接続した状態でドリルを貫通させます。 |
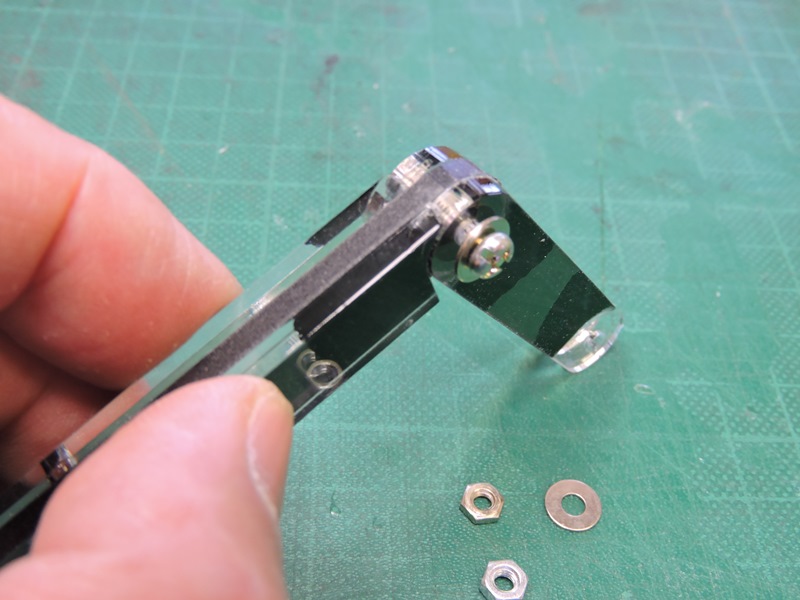 本体外側から、ワッシャを 介してネジを通します。 |
 反対側にもワッシャを介し、1枚目の ナットを「遊び」を残して入れます。 |
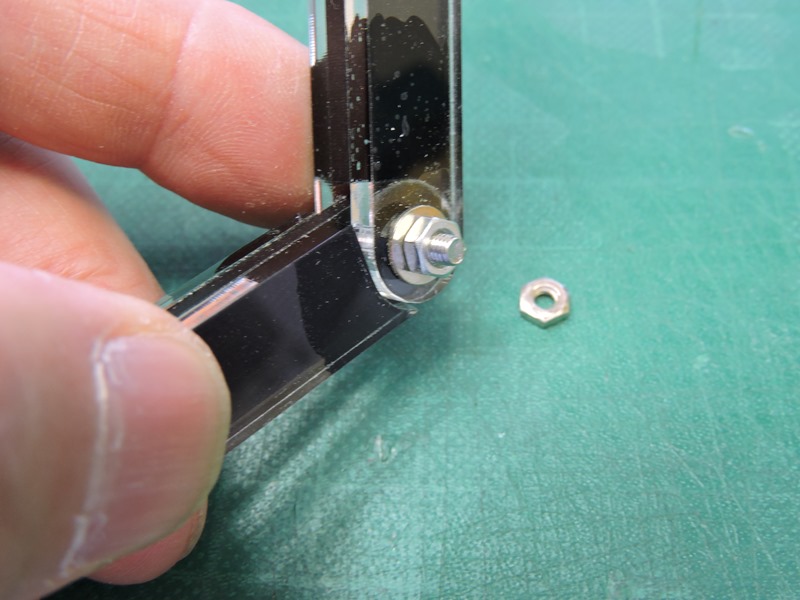
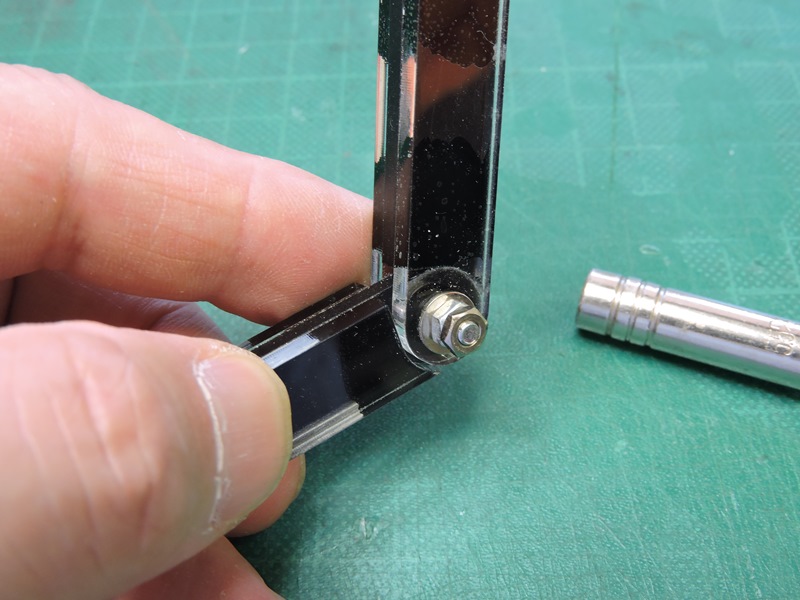 リンクの揺動によりネジやナットが回転して緩む 可能性があります。ナットをもう1枚入れます。 |
 1枚目のナットを固定した状態で、2枚目の ナットを強く締め込みます(ダブルナット)。 |
 4脚の組み立て完了です。ネジ止めに遊びがあるので接続部は 自在に動きます。同時に、揺動平面以外の方向に対して高い 剛性が保たれています。安定した歩行性能が期待できます。 4足歩行ロボットの組み立て その1へ 4足歩行ロボットの組み立て その3へ |
|
|
|
|