| ・デジタルプロポーショナルを診る(2019.1.21) |

ご高齢の男性が昨年12月に守谷おもちゃ病院にお持ちになりました。27MHz帯を 使用したラジオコントロールのランドクルーザーです。30年以上前に当時小学生だった ご子息に購入されたそうです。途中で診療時間内ではとても手に負えないと判断し、 工房に持ち帰ってきました(入院扱い)。さらにご依頼者に了解をいただき、守谷工房 扱いの修理に変更させてもらいました。デジタルプロポーショナル方式の解析と理解、 部品の調達に長い時間を要し、年をまたぐ修理作業となりました。 掲載写真88枚 |
||
 当時のままの色褪せた外箱と壊れかけた 内箱が、長い年月を物語っています。 |
 何と説明書まで保管されています。手に 入れたい方が大勢依頼っしゃるのでは。 |
|
 車体本体と送信機のセットです。当時は とても高級な玩具だったと思います。 |
 箱から取り出します。ランドクルーザーの 風格が再現され、重量感が漂います。 |
|
 トレッド幅の広いゴム製中空タイヤは、屋外でのオフロード走行を可能にします。 実際に泥濘(ぬかるみ)を何度も走行させたようで、車体の各部は泥まみれです。 |
||
 車体底部を確認します。泥汚れが全面に広がって います。タイヤのトレッドパターンが前後で異なります。 |
 一面の擦り傷は激しいダート走行によるものでしょう。 堅牢で耐久性のある前輪サスペンションです。 |
|
 底部のバッテリーボックスを開けてみます。とても 防水仕様とは言い難く、泥水の浸入が心配です。 |
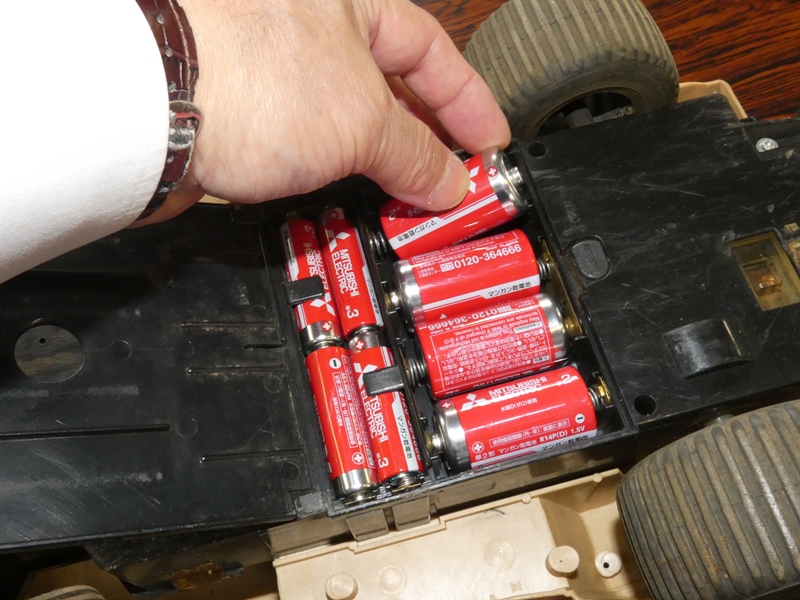 動作確認を行うため、新しい乾電池をセット します。制御用・走行用に分かれています。 |
|
 送信機にも乾電池をセットします。006Pを使用 しないのは電池寿命を長くとるためでしょうか。 |
 本体LED、送信機LEDとも点灯しますが、 送信機のレバー操作に全く反応しません。 |
|
 受け取り時に伺ってはおりましたが、 あらためて全滅状態が確認されました。 |
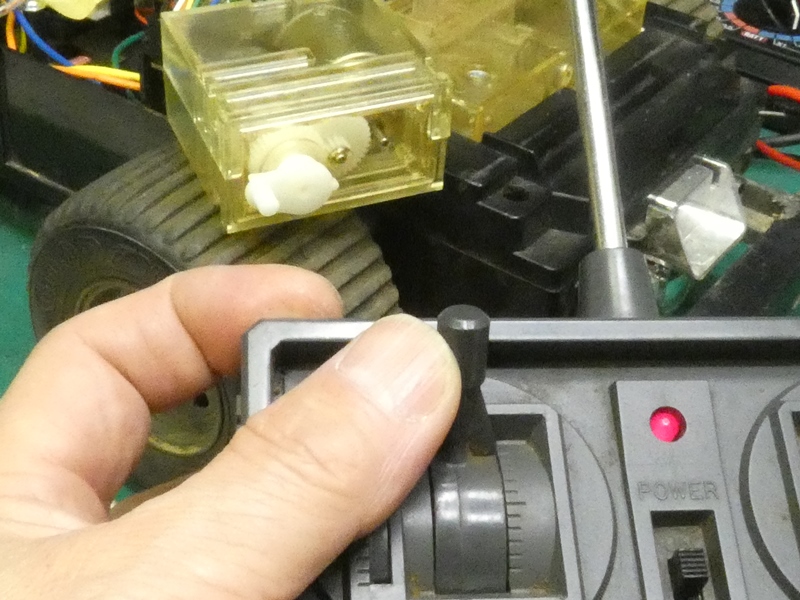
 上部車体を固定するネジ(6本)、走行駆動部の ギヤ比を変更するレバーの固定ネジを緩めます。 |
|
 ギヤ比切り替えレバーを抜き取ります。手前の スライドスイッチは本体の電源スイッチです。 |
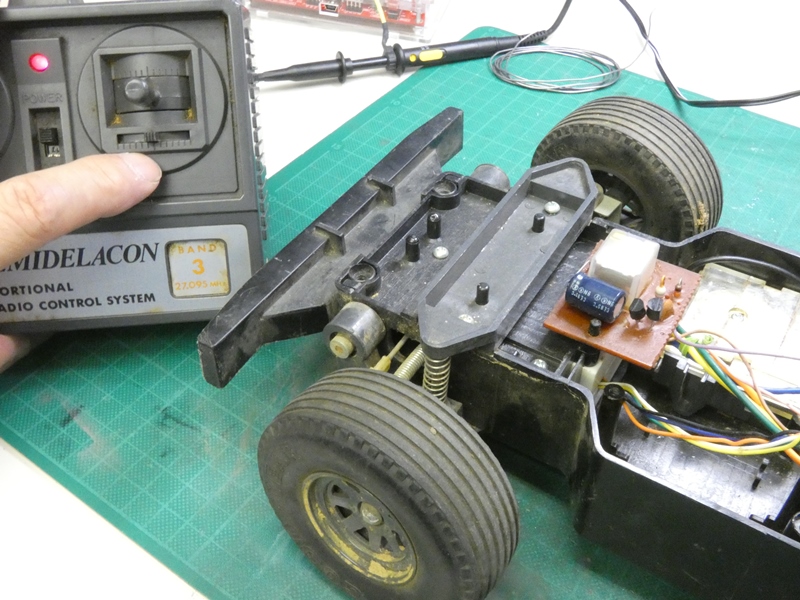
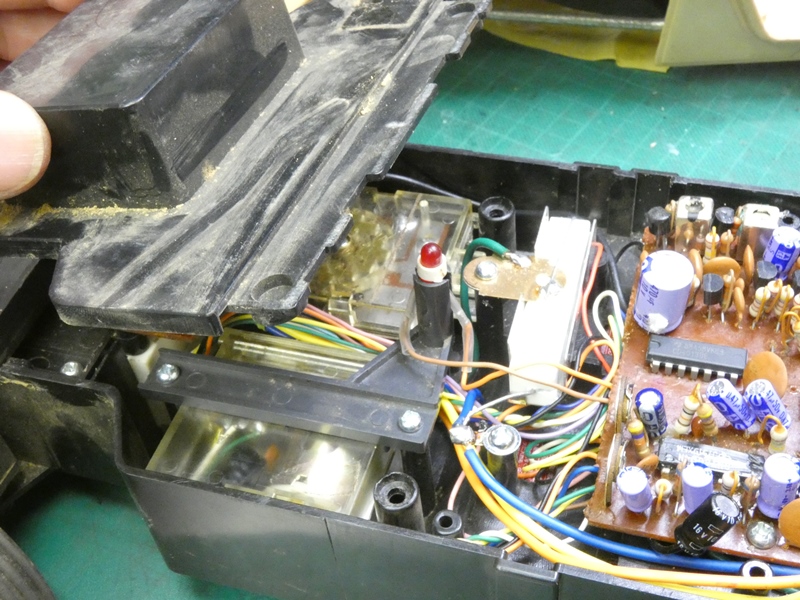
 車体上部を取り外します。内部の駆動 機構や制御回路が見えてきます。 |
|
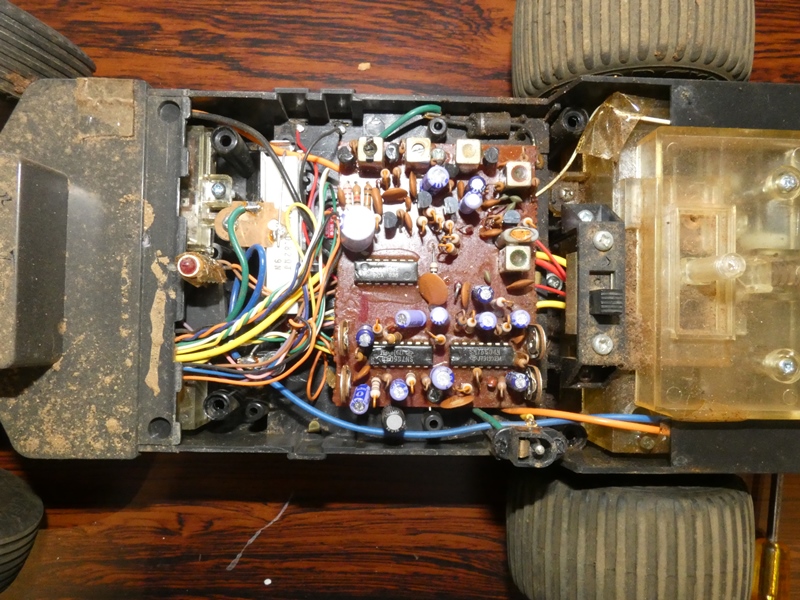 現在の単純化されたラジコンカーに比べると、堪らないごちゃつき感です。 車体中央にRF回路、サーボ駆動回路を含む回路基板が取り付けられ、 何本もの訳の分からない配線が車体内に張り巡らされています。 |
||
 回路基板と前輪の中間はカバーで覆われ、その下に やはり訳の分からない部品が取り付けられてます。 |
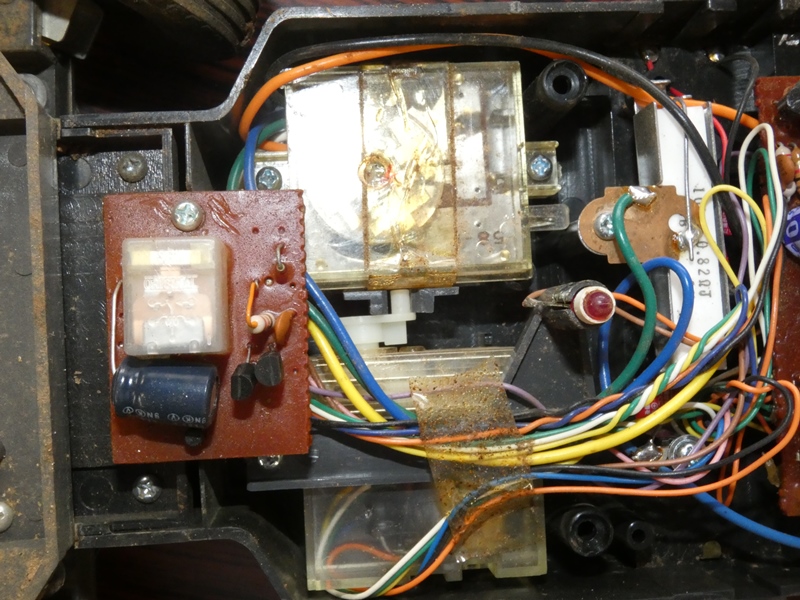 小さな回路基板が1枚、何やら駆動機構を 内蔵する透明樹脂製ボックスが2個です。 |
|
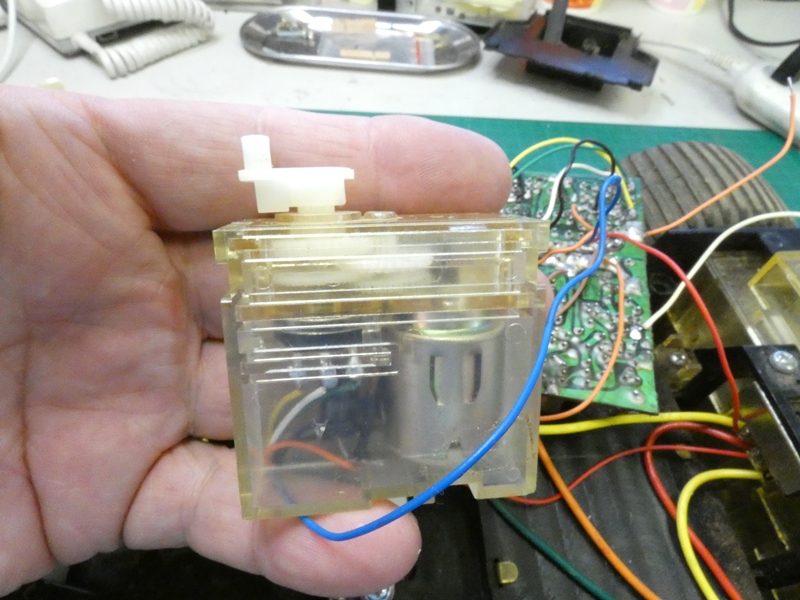 車体左側のボックスです。中にモーターと減速ギヤ、ポテンショ メーター代わりの可変抵抗器が見えます。サーボモーターです。 |
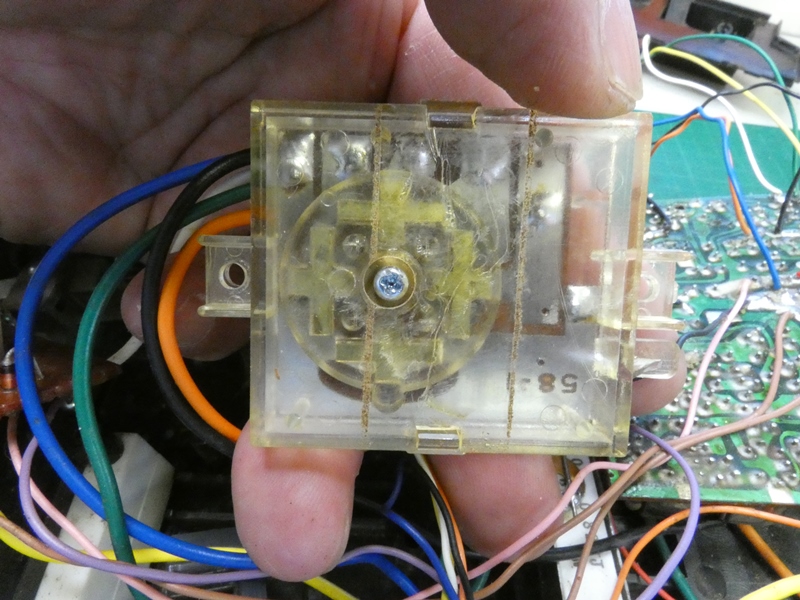 もう1個はサーボモータにより駆動されるスイッチ ボックスです。電極が付いた円盤が回転します。 |
|
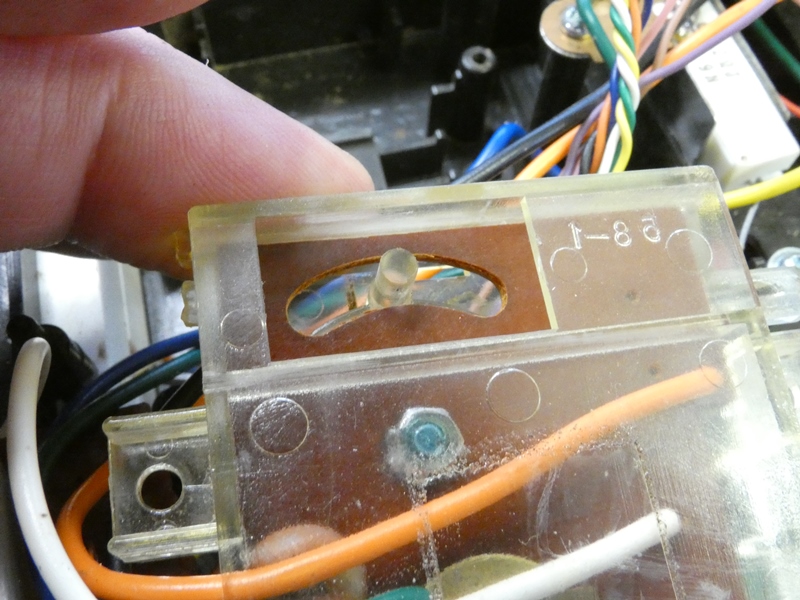 円盤の外周に突起があり、ボックスの 底面から外部に飛び出しています。 |
 ボックスの下に左右にスライドする樹脂製部品が あります。この縦長の溝に突起の先が入ります。 |
|
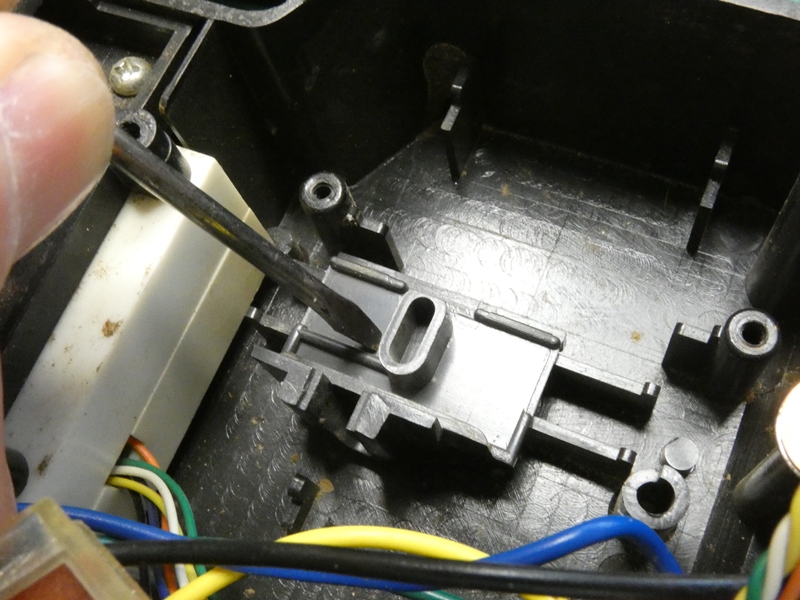
 サーボモーターのアクチュエータがスライダーを 開始てスイッチボックスを切り替える仕組みです。 |
 この小さな回路基板の役割が不明です。 基板上に小型の電磁リレーがあります。 |
|
 本体電源スイッチを入れた瞬間、前輪の操舵機構が僅かに 反応します。しかし送信機がOFF状態では無反応です。 |
 役割が分かりました。送信機のキャリアを受信している 時だけ、操舵を含む駆動系に電力を供給するリレーです。 |
|
 送受信が途絶えた際に走行を停止させるための工夫です。 また、RF部のキャリア受信が機能していることが分かります。 |
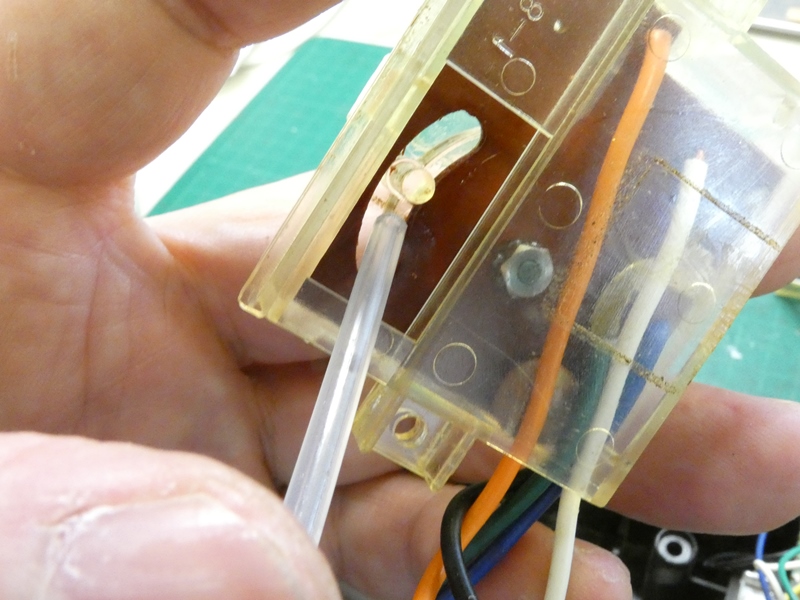 分解ついでにスライダーや円盤の 摺動部に注油しておきます。 |
|
 スイッチボックスの円盤を回すと、後輪が勢い良く正逆に 回転します。不具合はRF部を除く回路基板上にあります。 |
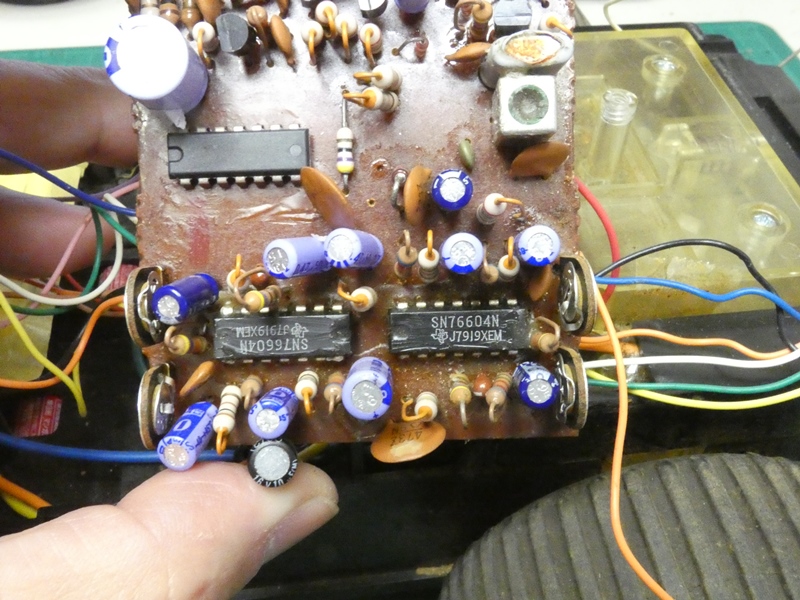
 パルス信号の間隔を変化させることで操作を伝達するデジタル プロポーショナル方式です。SONYラジオのような基板です。 |
|
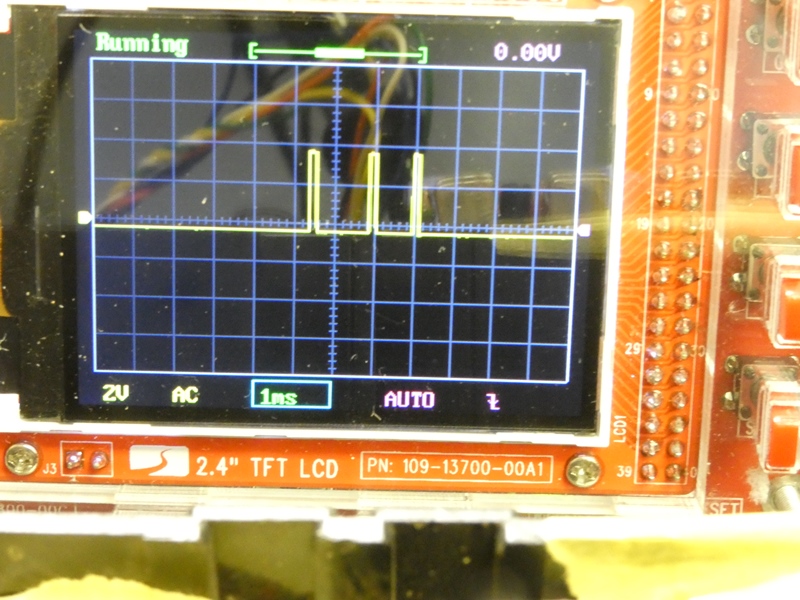
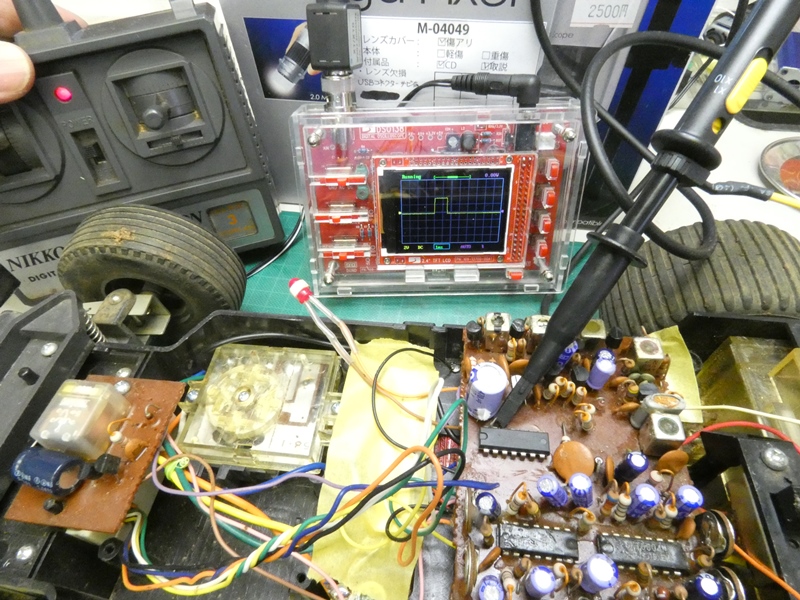
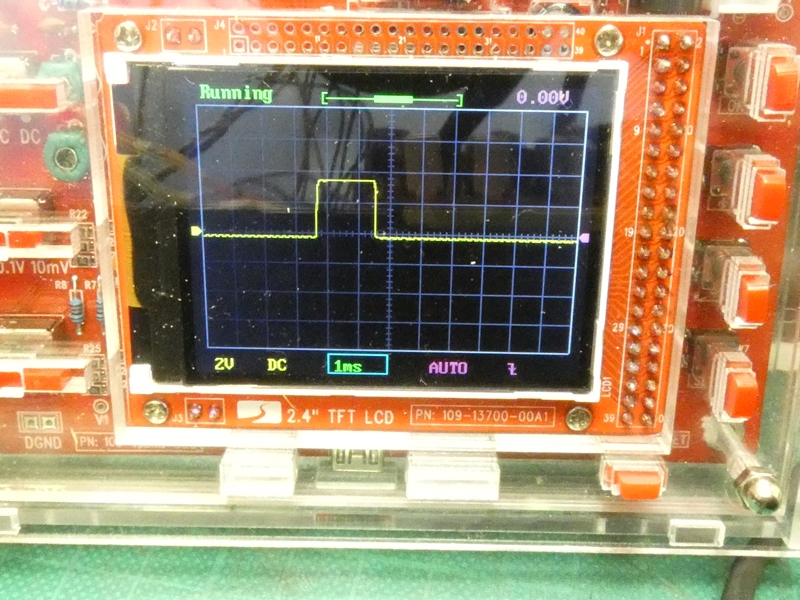
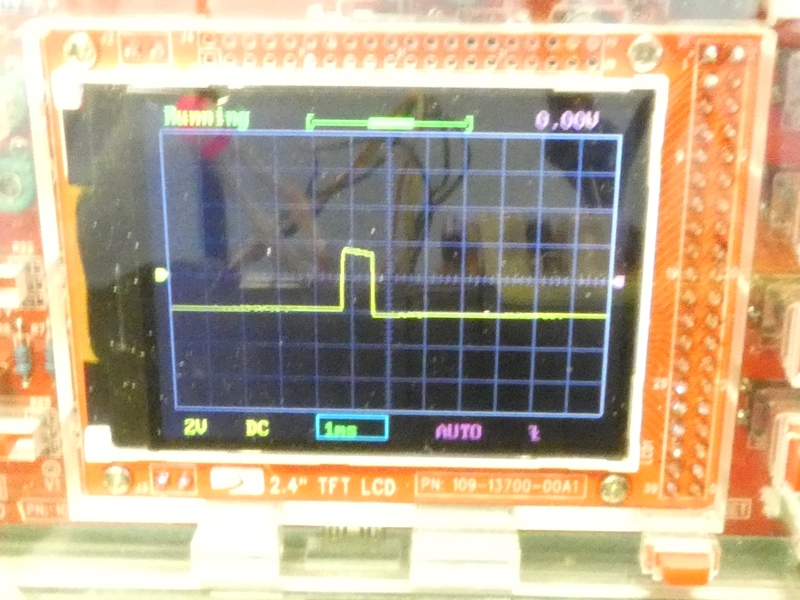
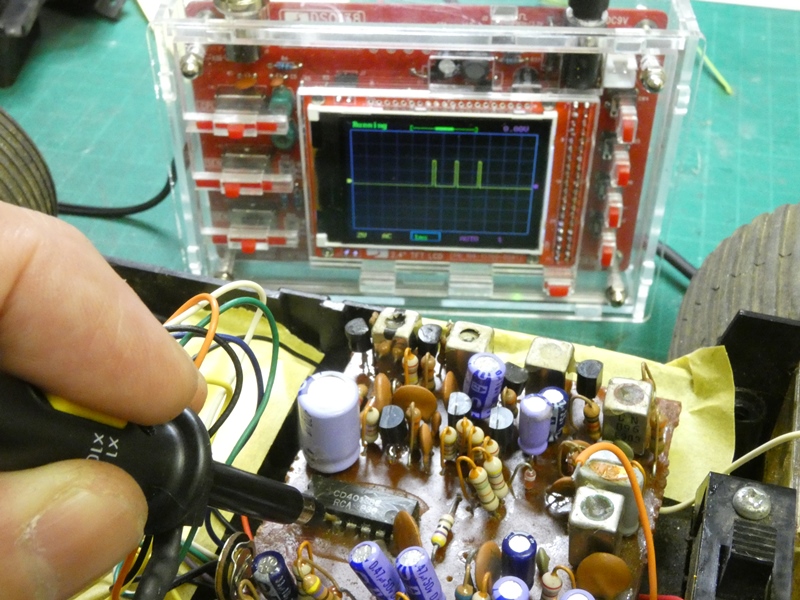 RF受信部からクリッピング出力されるパルス列を調べます。昨年12月に組み立てた デジタルオシロスコープを活用します。デジタルICの入力に加わる信号を観測します。 |
||
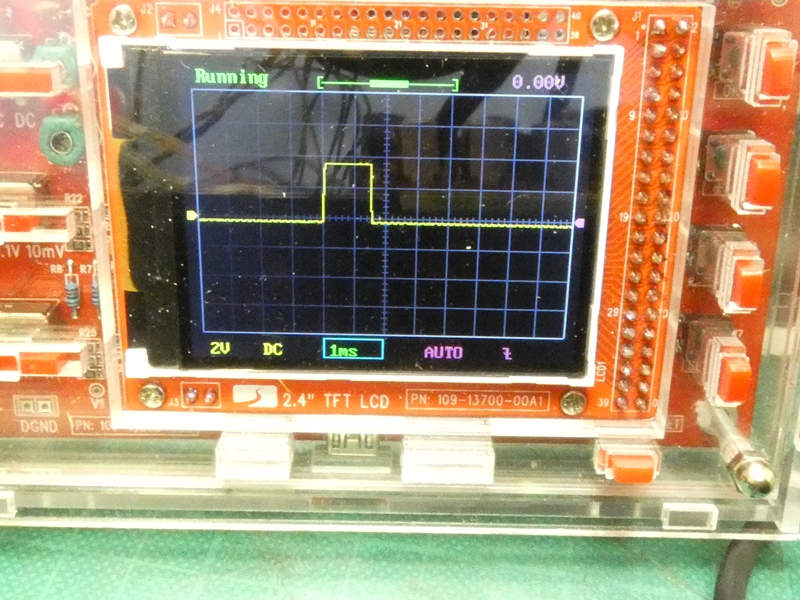
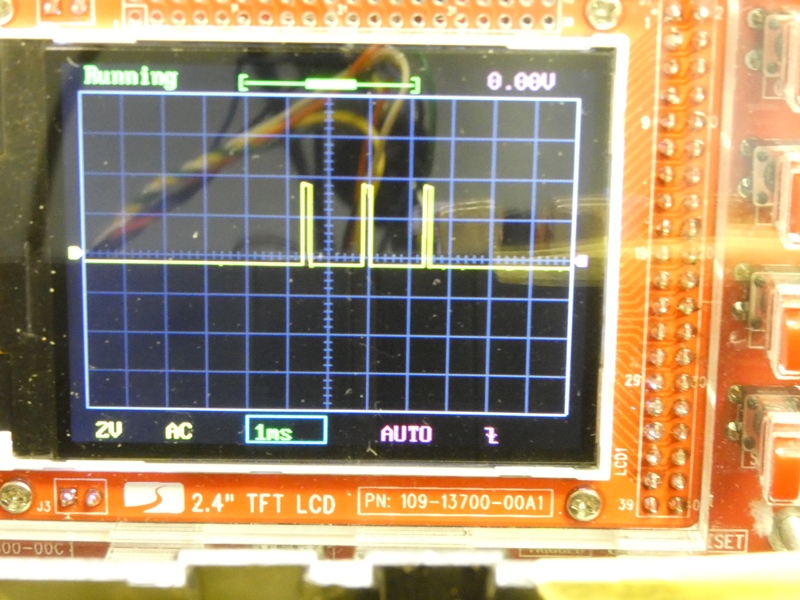 送信機のレバーを一切操作していない状態で、 等間隔で連続する3個のパルス列が観測されます。 |
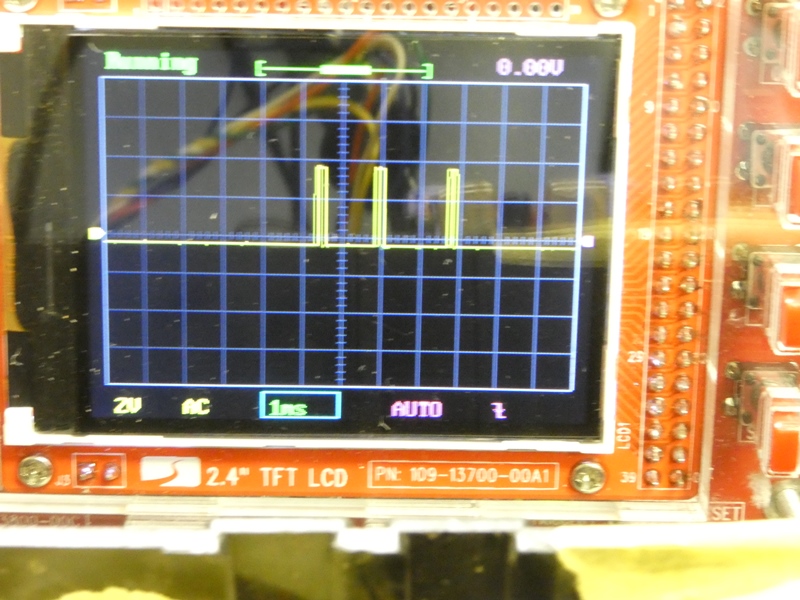
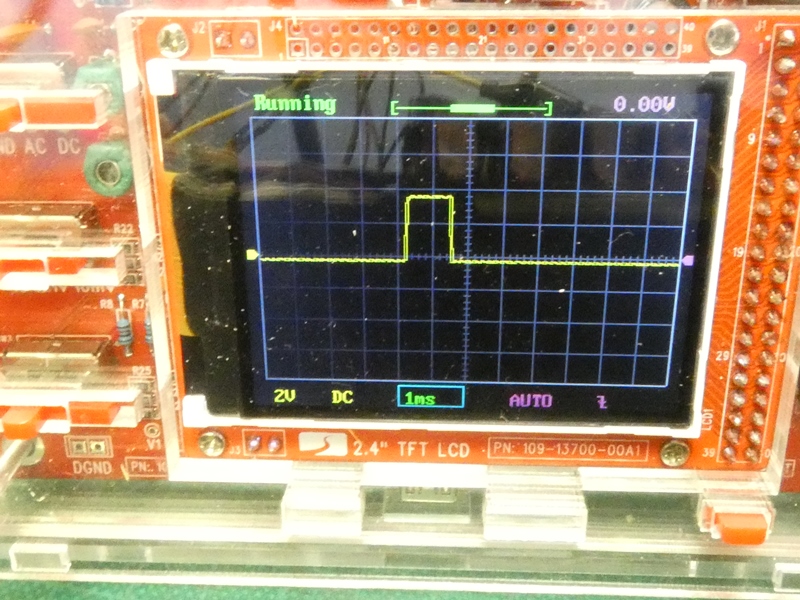
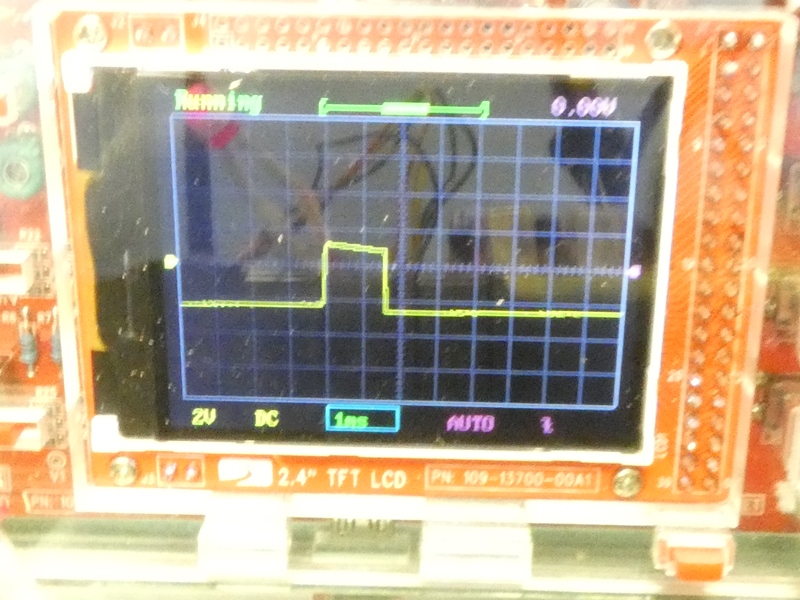
 ステアリング(操舵)レバーを右に倒すと、 2番目と3番目のパルス間隔が狭まります。 |
|
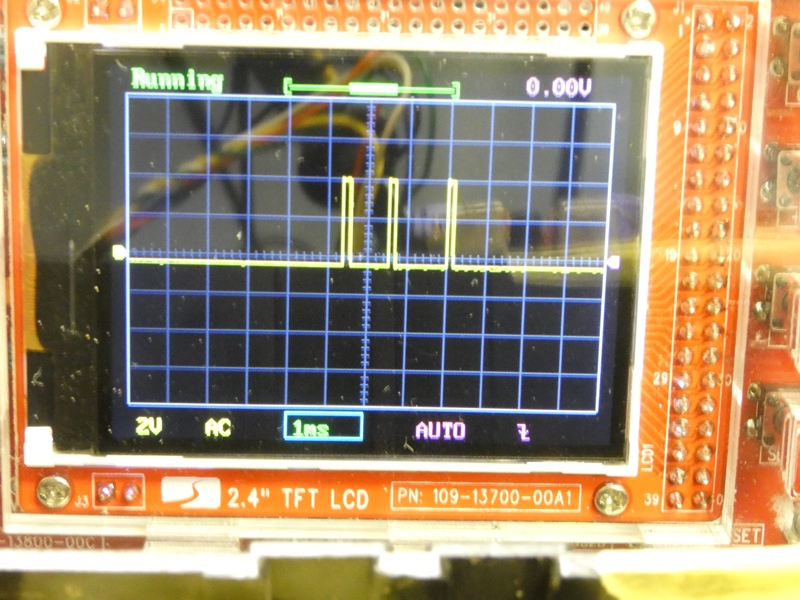
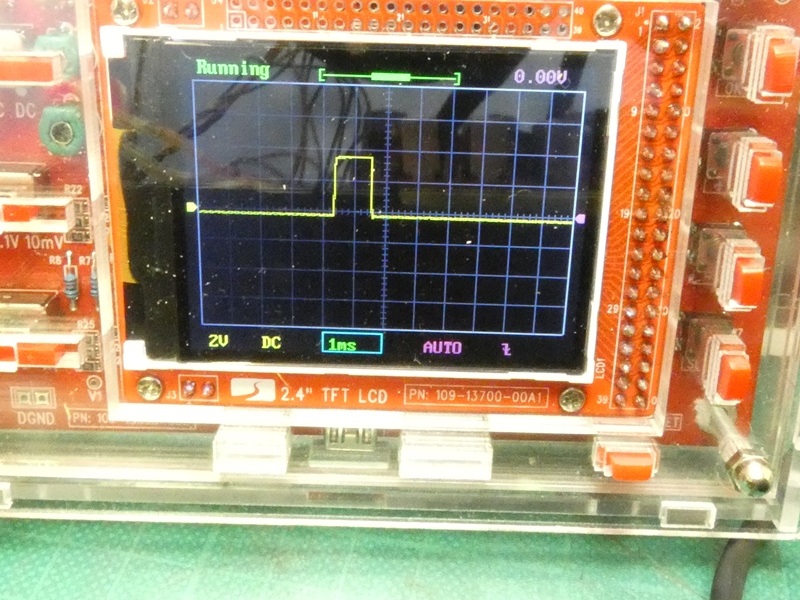
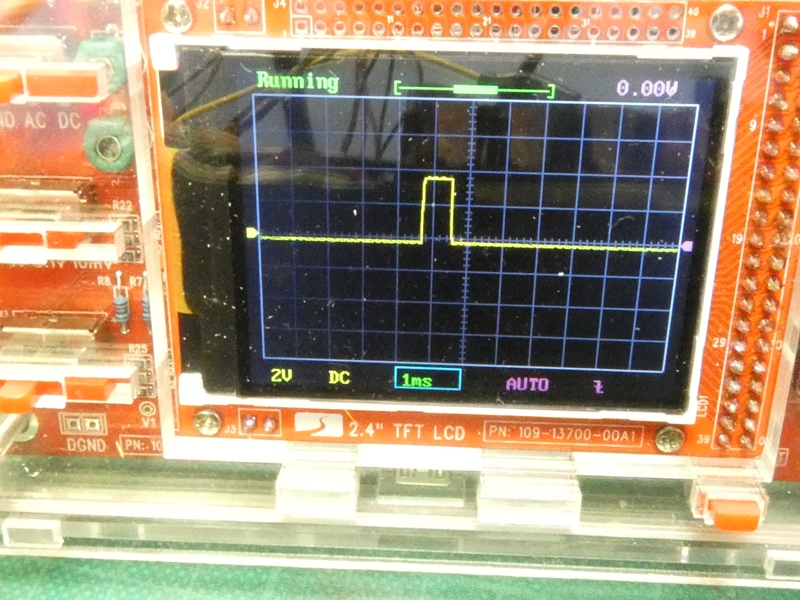
 ステアリング(操舵)レバーを左に倒すと、 2番目と3番目のパルス間隔が広がります。 |
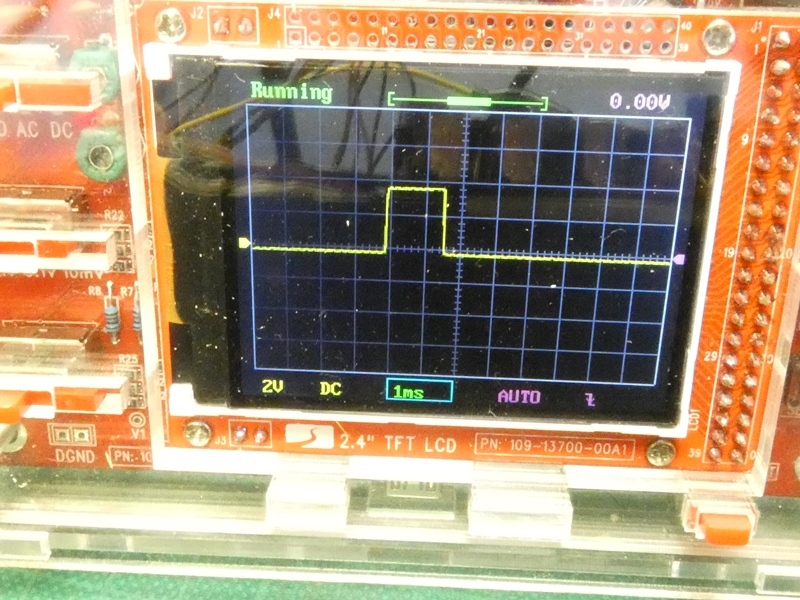
 ドライブ(走行)レバーを上に倒すと、 1番目と2番目のパルス間隔が狭まります。 |
|
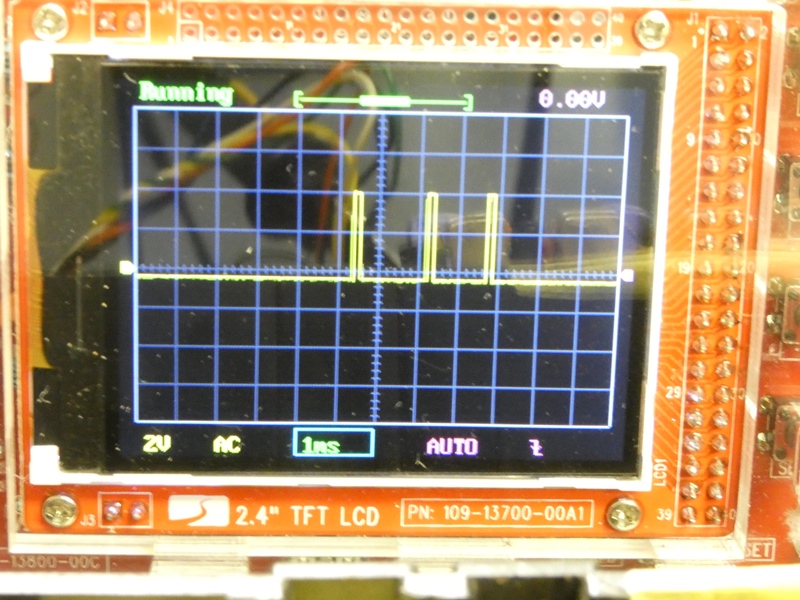 ドライブ(走行)レバーを下に倒すと、 1番目と2番目のパルス間隔が広がります。 |
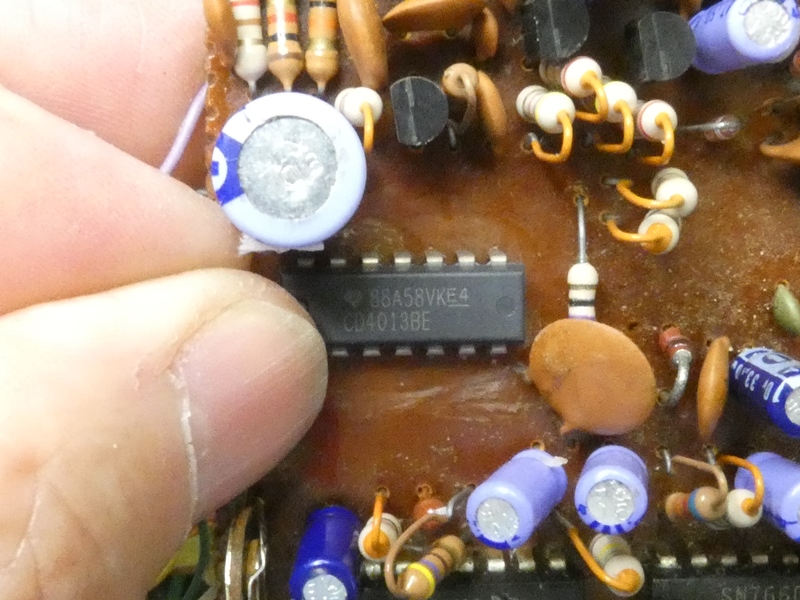
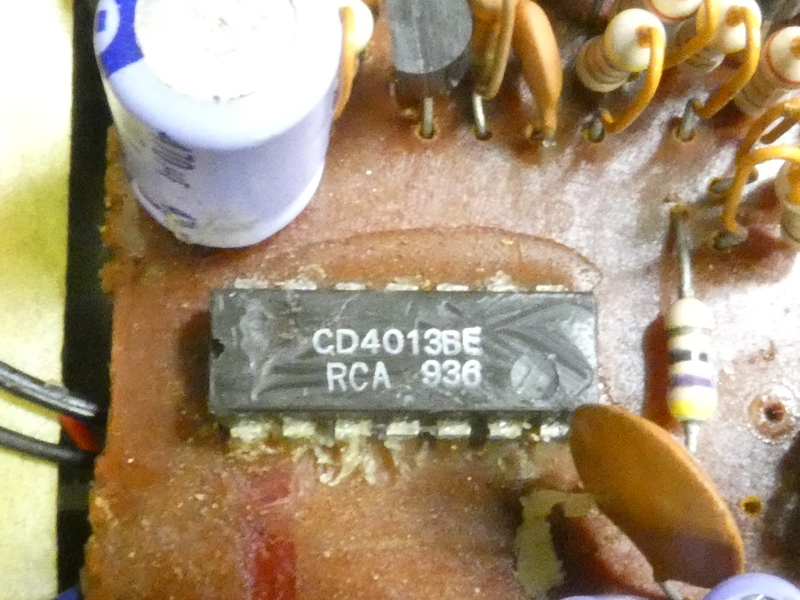 操作により間隔が変化するパルス列を CD4013B(CMOS)に入力します。 |
|
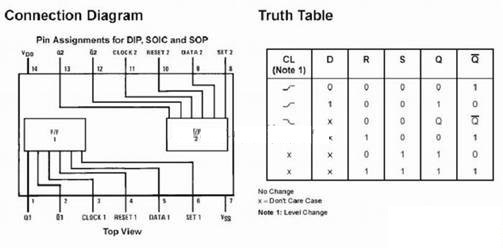 CD4013には2組のFF(Dフリップフロップ)が内蔵されています。1番目と2番目、または 2番目と3番目のパルスを使用し、パルス間隔の変化をパルス幅の変化に変換します。 走行・操舵ともに操作不能ということは、このICが動作していない可能性があります。 |
||
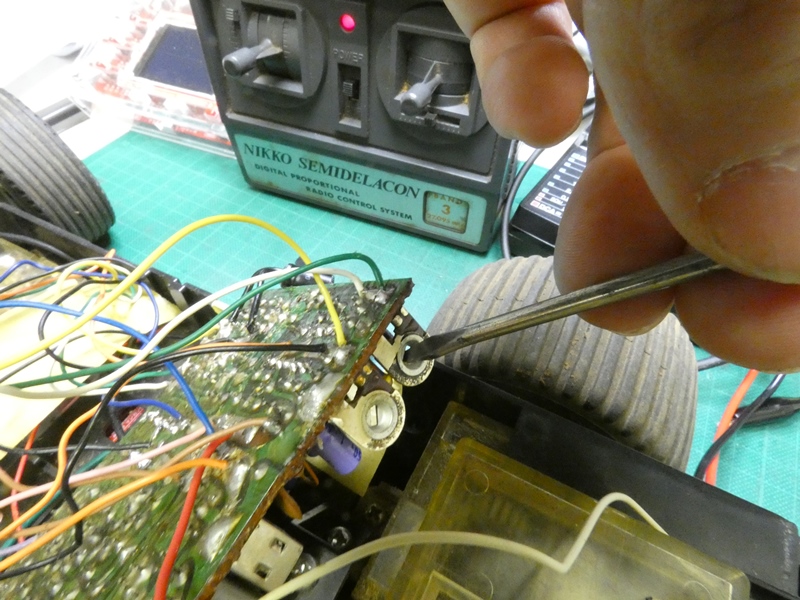
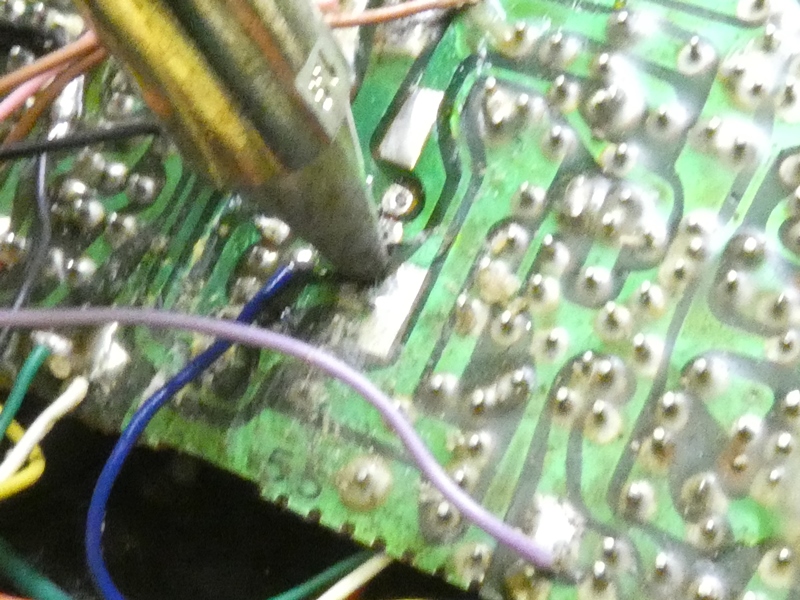 半田吸い取り機が戦列に加わっているので ICチップの取り外しが苦になりません。 |
 ホールの中に入り込んだ半田 まで綺麗に除去してくれます。 |
|
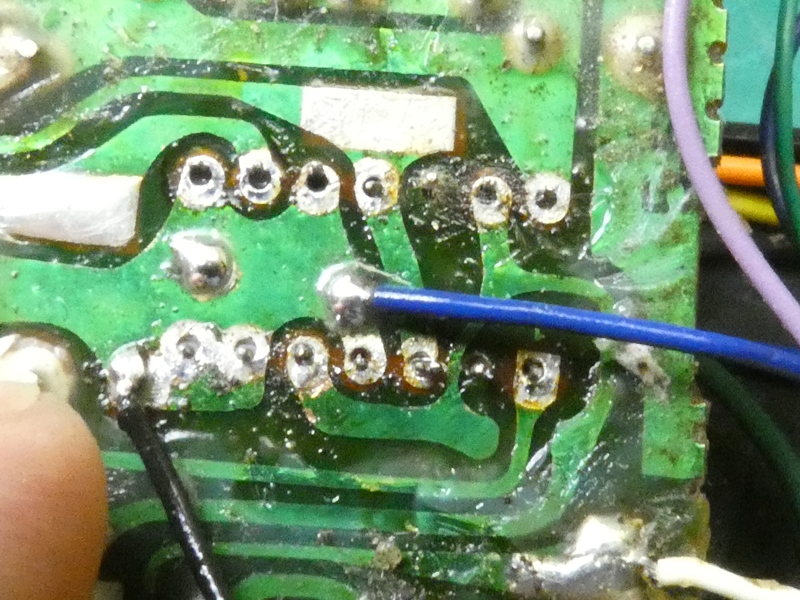 14ピン分の半田を吸い取りました。 ランドや配線パターンを傷めずに済みます。 |
 ICと基板の間にドライバーを 差し込み、ICを持ち上げます。 |
|
 動作不良が疑われる CD4013Bを取り出します。 |
 当たり前ですが同等部品は既に品薄です。聞いた ことのない小さなネットショップに在庫を見つけました。 |
|
 Amazonのように翌日に配送・・など望むべくも ありません。到着まで作業は完全に中断です。 |
 ようやく到着したCD4013Bは、純正 Texas Instruments社製の新品です。 |
|
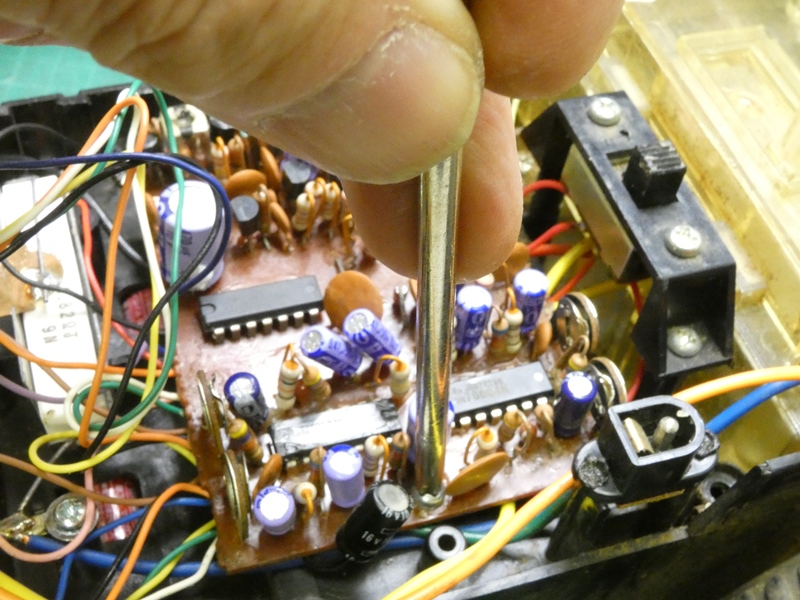
 元の位置に挿入します。シルク印刷のない基板 なので、取り付け方向を誤らないよう留意します。 |
 裏側を半田付けします。2組のFFに共通のパルス列を送るため Clock1(3番ピン)とClock2(11番ピン)が短絡されています。 |
|
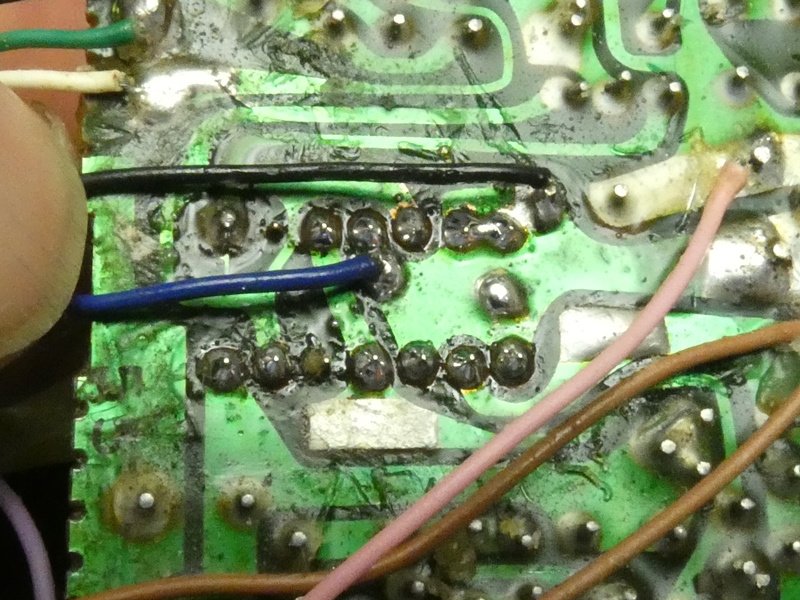 デジタルプロポーショナルの登場初期は、パルス列の 変換回路をディスクリート部品(TR)で作り上げていました。 |
 CD4013Bの交換を終え、 再び動作確認を行います。 |
|
 ステアリングレバーを右に倒すと、 前輪が右方向に舵を切ります。 |
 レバーを左に倒すと左方向に舵を切ります。 ステアリング(操舵)の機能が復活しました。 |
|
 ステアリングは復活したものの、走行レバーの操作には何も反応しません。前後進の 機能にまだ不具合があります。デジタルオシロスコープでさらに原因を探ります。 |
||
 CD4013Bの一方のFF出力、Q2の信号波形を確認 します。無操作時は一定幅のパルスが出力されています。 |
 Q2はステアリング用サーボモーターを駆動する出力です。 ステアリングレバーを右に倒すとパルス幅が狭まります。 |
|
 ステアリングレバーを左に倒すとパルス幅が 広がります。正常に機能しています。 |
 CD4013Bの他方のFF出力、Q1の信号波形を確認 します。Q1は走行制御用サーボモーターを駆動します |
|
 走行レバーの無操作時は一定幅の パルスが出力されています。 |
 走行レバーを上に倒すとパルス 幅が狭まります(前進走行)。 |
|
 走行レバーを下に倒すとパルス幅が広がります (後進走行)。こちらも正常に機能しています。 |
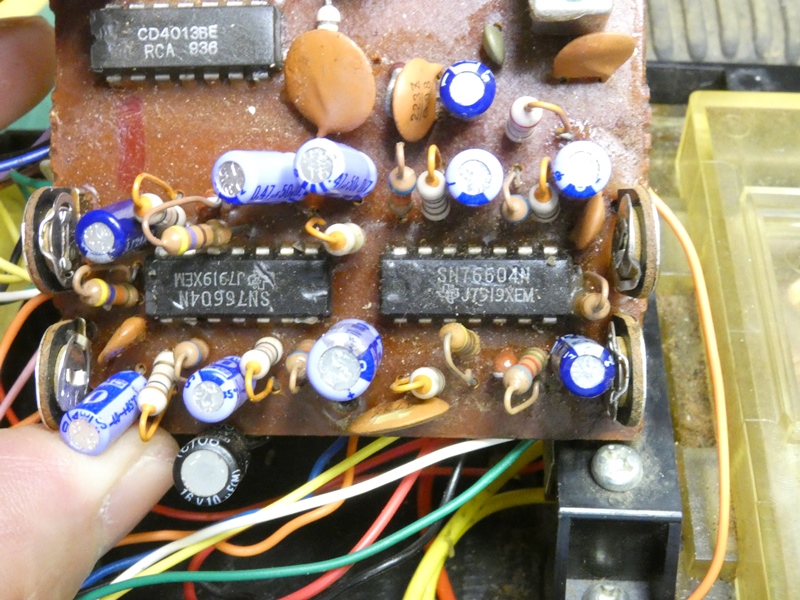 そうすると次段のSN76604N(サーボ アンプ)にも不具合が疑われます。 |
|
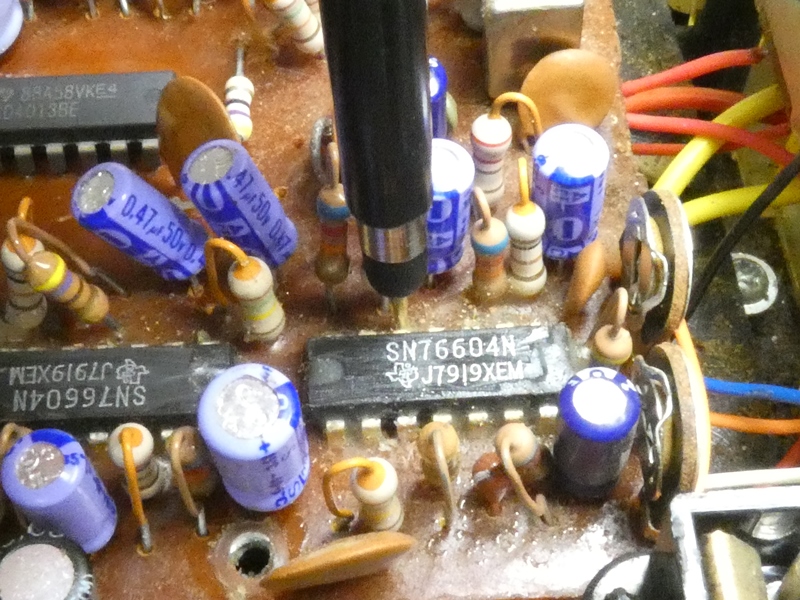
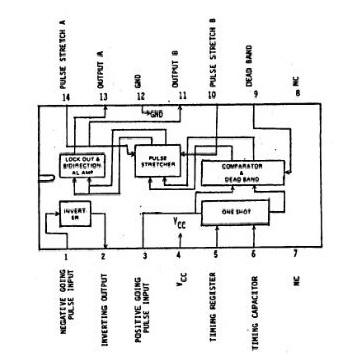 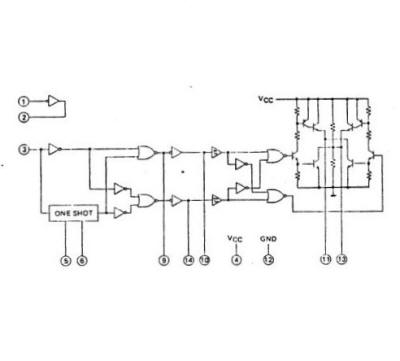 SN76604Nはパルス幅検知型双方向サーボアンプです。送り込まれる パルス幅の変化に応じて、サーボモーターを駆動する電力を出力します。 |
||
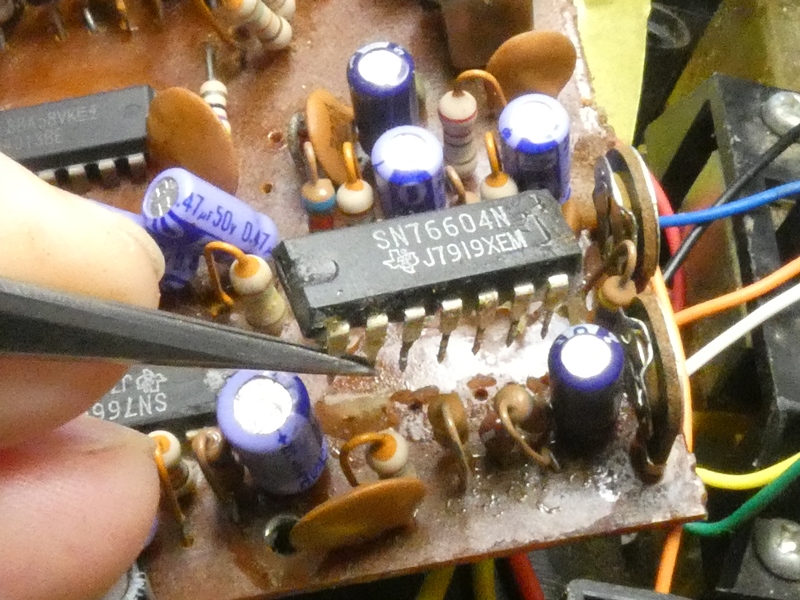
 走行用サーボモーターを駆動するのは写真右側の SN76604Nです。オシロスコープで動作を確認します。 |
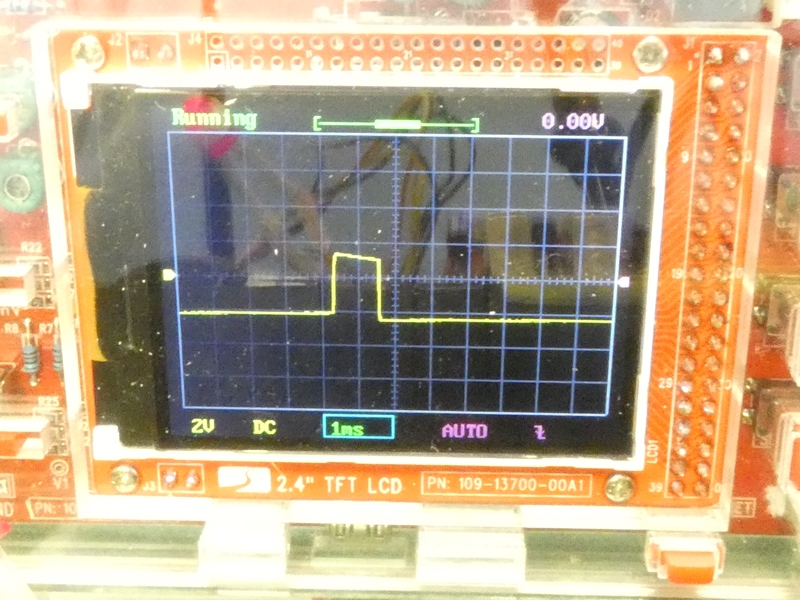 CD4013Bからの入力(3番ピン)を確認します。 波形の乱れはありますが正常に入力されています。 |
|
 走行レバーを上に倒すと パルス幅が狭まります。 |
 逆に、走行レバーを下に倒すとパルス幅が 広がります。入力に問題はありません。 |
|
 サーボモーターへ出力 される信号を調べます。 |
 走行レバーを操作しても(パルス幅が変化 しても)、出力に何の変化も現れません。 |
|
 片側(走行用)のSN76604Nが破損しています。 交換用の部品を探さなければなりません。 |
 国内に在庫のある販売店は見つけられませんでした。 国外のサイトでようやく見つけるも、納期は20日以上です。 |
|
 年をまたいでようやく到着し、修理作業を再開 します。折角調べたことを忘れかけています。 |
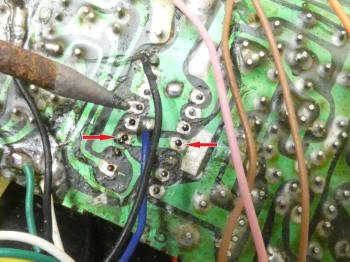
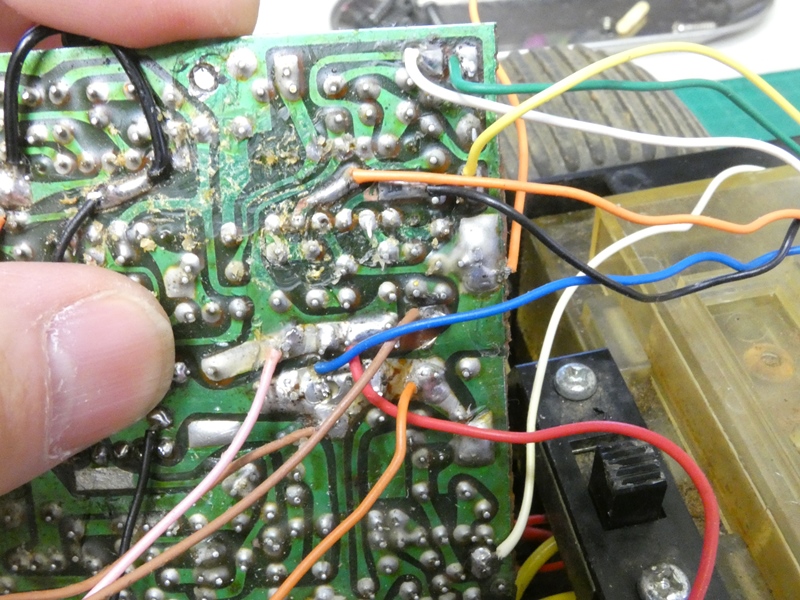
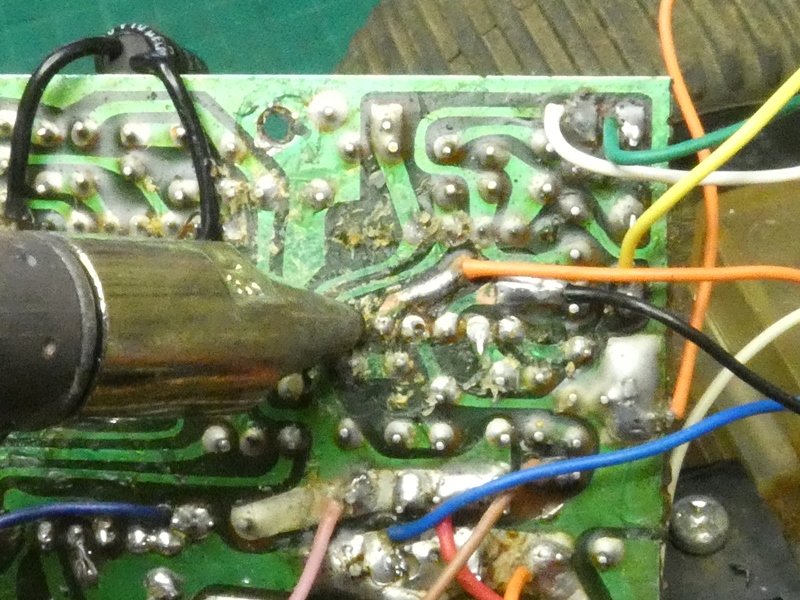
 半田を吸い取り、元のSN76604Nを取り外し ます。配線パターンを傷めないよう留意します。 |
|
 ドライブ段を持つTTL-ICは破損する可能性が低くありません。 駆動するモーターのノイズ対策が不十分なのかも知れません。 |
 新しいSN76604を取り付けます。 ピンの列間隔を調整して差し込みます。 |
|
 走行制御用のサーボモーターが音をたて始めました。 基板上の半固定抵抗器でニュートラルを調整します。 |
 送信機の走行レバーにサーボモーターが 反応してくれれば修理成功です。 |
|
 走行レバーを上に倒します(前進走行)。アクチュエーターが 左に1/4回転して停止します。離すと自動的に戻ります。 |
 下に倒すと(後進走行)右に1/4回転して停止します。 30数年前のデジタルプロポーショナルの復活です。 |
|
 回路基板を元の位置に戻し ネジ2本で固定します。 |
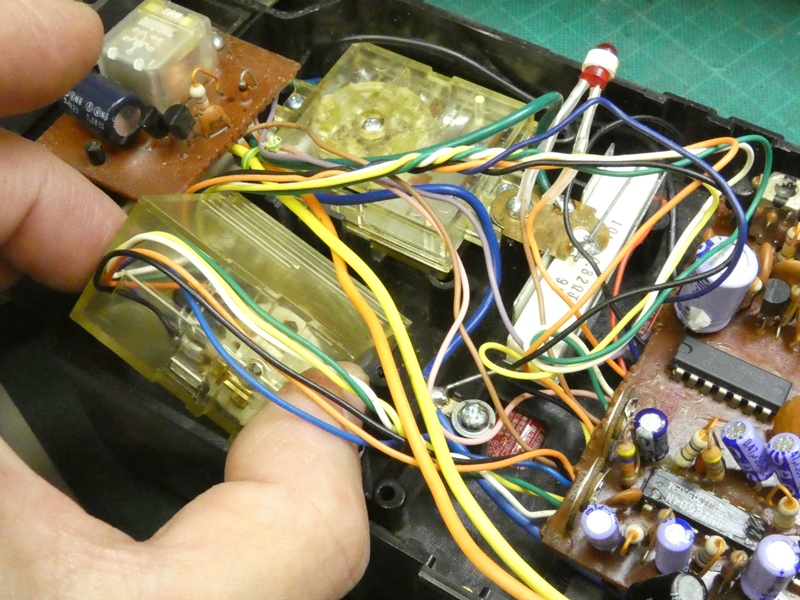 走行制御用のサーボモーターを組み 込みます。配線を整えるのが大変です。 |
|
 サーボユニットの固定と電源LED 取り付け用のステーを戻します。 |
 その上から機構を保護するカバーを被せます。この 時点で実走確認を行います。力強く走行します。 |
|
 泥まみれだった車体上側を洗剤をかけて水洗いします。明るいベージュ クリーム色が蘇りました。樹脂表面にはさほど傷みがありません。 |
||
 シャシー周りも、水洗いはできませんが こびり付いた泥を丁寧に落とします。 |
 車体上側をシャシー側と合体させます。 おもちゃドクターとして安堵する瞬間でもあります。 |
|
 昨年組み立てたデジタルオシロスコープが大いに活躍 しました。記念にランドクルーザーとツーショットを1枚。 |
||
 晴れて退院、ご依頼主にお返しする日がやって参りました。長くお預かりしていると、 どこか名残り惜しくなるものです。小学校に入る頃を待って、お爺ちゃんからお孫さんに 贈りたいそうです。お渡しすると奥様(お婆ちゃん)ともども大変喜んで下さいました。 |
||
|
||